INDUSTRIE
TBI 1: Teilautomatische Aufarbeitung von Gussformen mir Roboter
Im Test Before Invest – Projekt des European Digital Innovation Hub (EDIH) AI5production wurde von der PROFACTOR GmbH an einer Machbarkeit für ein teilautomatisches Polieren von Waschbecken mit Robotersystem gearbeitet.
Hierbei untersuchte man folgende Schlüsselfaktoren:
Die Identifikation der Einsatzgrenzen für die Spot-Repair-Bearbeitung von Waschbecken durch einen Roboter, wobei besonderes Augenmerk auf die erreichbare Polierqualität gelegt wurde. Die Anwendbarkeit einer Stifteingabe in Verbindung mit Projektion kann die Auftragserzeugung signifikant beschleunigen und effizienter zu gestalten. Die Adaptierbarkeit und notwendigen Erweiterungen der bestehenden Werkzeugtechnik standen im Fokus, um den Robotereinsatz optimal zu integrieren.
Die Machbarkeit der Ableitung spezifischer Roboterprogramme aus 3D-Scan/Geometriedaten wurde erfolgreich geprüft, was eine präzise und individuelle Bearbeitung ermöglicht.
Des Weiteren wurden Vorgaben für ein Maschinenkonzept mit mehreren Aufspannplätzen abgeleitet, um Aussagen zum notwendigen Invest zu machen. Dieses Projekt ebnet den Weg für die Integration von Robotertechnologie in die -Fertigung von Sanitärprodukten und verspricht eine signifikante Verbesserung der Ergonomie und Arbeitsplatzqualität unter dem Aspekt des wachsenden Fachkräftemangels. Die Teilautomatisierung erlaubt hier ebenso bei hoher Variantenvielfalt und kleinsten Stückzahlen eine Steigerung der Prozess- und Produktqualität.




TBI 2: MultiStation – Machbarkeit Mehrzweck Montagestation
Im Test Before Invest – Projekt des European Digital Innovation Hub (EDIH) AI5production wurde von der PROFACTOR GmbH an einer Machbarkeit die Realisierbarkeit eine Mehrzweck Roboterstation für Metallbaugruppen untersucht.
Dabei wurden im Besonderen folgende kritische Aspekte untersucht.
- Nachweis prozesssicheres Aufspannen und Verschrauben von Geländer-Teilmodule
- Ableitung eines modularen Anlagenlayout für eine Mehrzweck-Montagebetrieb mit möglichster universeller Ausrüstung
- Ableitung / Verifikation von Vorgaben für eine rekonfigurierbaren Steuerungsarchitektur zum Errichten und Betreiben einer Doppelroboteranlage und deren Peripherie-Komponenten
- Ableitung der Vorgaben für die Anlagenbedienung und das Sicherheitskonzept
- Identifikation der Rahmenbedingungen und Anforderung im Hinblick auf Personal und Eigenexpertise für einer vorrangig in Eigenregie erfolgende Umsetzung der Anlagenerrichtung.
Die Projektergebnisse bilden die zentrale Basis für ein bereits gestartetes Realisierungsprojekt bei dem eine Probebetrieb ab Herbst 2024 geplant ist.
Dies war nur möglich durch die zeitnahe Verifikation der kritische Prozessaspekte mit Hilfe der Realtests. Die geplante Mehrzweckanlage soll künftig eine wirtschaftliche und skalierbares Lösung für die wachsende Produktionsmenge von derzeit noch manuell montierten Teilmodulen darstellen. Hierfür wurde auch das mögliche Produkt/Prozessspektrum das diese Anlage bedienen könnte bereits berücksichtigt, sodass bei künftigen neuen Produkten bereits sehr früh eine Teilautomation erfolgen kann.


TBI 3: 3D Vermessung von Baugruben
Das Vorhaben verfolgt das Ziel durch Digitalisierung die Dokumentation von oberflächennahen Tiefbaudurchführungen zu vereinfachen, zu beschleunigen und gleichzeitig mehr Informationen zu erfassen. Konkret sollen auf einfache Art und Weise Verlegetiefe, Künettenlänge, Künettenbreite und Aushub in einem 3D-Modell erfasst und dokumentiert werden. Die Verwendung von Laserscans ist aufwendig und kostenintensiv.
Ziel ist es deshalb zu untersuchen ob mit den Sensoren (LiDAR) mobiler Geräte wie zum Beispiel eines iPhones 3D Modelle erzeugt werden können, die eine ausreichende Genauigkeit aufweisen. Im Rahmen eines Test before invest wurde der LiDAR Sensor eines iPhones mit einem Laserscanner verglichen. Dafür wurde eine App zur Datenakquise mit dem iPhone entwickelt. Damit konnten der Einfluss verschiedener Aufnahmemethoden und visuelle und quantitative Vergleiche erarbeitet werden. Es hat sich gezeigt, dass die Sensoren des iPhones ausreichend für diesen Use-Case sind.
Das Test before invest hat einen wichtigen Beitrag zu einfachen und kostengünstigen digitalen Baustellenerfassung geleistet. Die Ergebnisse bilden die Grundlage für die mögliche Entwicklung einer kommerziellen App, die das Unternehmen vermarkten wird.

TBI 4: Pilot study for navigated brain surgery using robot auto-pilot
Industrieroboter zeichnen sich durch ihre Fähigkeit aus, Aufgaben konsistent zu reproduzieren, so dass sie programmierte Positionen präzise anfahren können. Die erreichbare absolute Genauigkeit für kartesische Bewegungen ist jedoch aufgrund ungenauer kinematischer Modelle sowie nicht modellierter Effekte wie Durchbiegung unter Last und Getriebespiel deutlich geringer. Um hochgenaue Bewegungen im kartesischen Raum zu erreichen, könnten teure externe Messgeräte (z. B. Laser Tracker) eingesetzt werden.
Eine andere Möglichkeit ist der Einsatz eines Bewegungserfassungssystems, das eine Reihe von Infrarotkameras (IR) und reflektierenden Markern verwendet. Es ist zwar relativ kostengünstig, bietet aber Skalierbarkeit für große Flächen und erzielt gute Ergebnisse bei der Verfolgung von Objektpositionen und -ausrichtungen. Für hochpräzise Anwendungen muss das System jedoch genaue Verfolgungsergebnisse unter industriellen Bedingungen und eine gleichbleibende Leistung auch nach einer Neukalibrierung des Multikamera-IR-Systems nachweisen.
Um diese Fragen zu klären, wurde ein Versuchsaufbau mit einem industriellen Roboter, einem hochpräzisen Laser-Tracker-System zur Erfassung der Grunddaten und einem IR-Kamera-Array-Tracking-System implementiert. Um qualitativ hochwertige Daten während der durchgeführten Experimente zu erhalten, wurde eine präzise gefertigte Edelstahlplatte am Flansch des Roboters befestigt, die Befestigungspunkte sowohl für den Reflektor des Laser Trackers als auch für die Marker des IR-Systems bietet. Während der Experimente folgte der Roboter verschiedenen Trajektorien, einschließlich derer, die vom Menschen vorgeführt oder künstlich erzeugt wurden. Das Projekt führte zu wertvollen Daten, die weiter genutzt werden, um den Status quo besser zu verstehen und das Verhalten der Kalibrierung und Verfolgung von IR-Kamera-Arrays zu verbessern. Anhand dieser Daten können in Zukunft algorithmische Verbesserungen mit der etablierten Basislinie verglichen werden.
Darüber hinaus deuten erste Analysen auf ein Potenzial hin, die durch ein ungenaues Robotermodell verursachten Fehler zu verringern, indem das IRSystem genutzt wird.

TBI 6: Precise sales forecast
Brotsüchtig ist eine moderne Biobäckerei mit Sitz in Steyregg, die neben hochwertigen Bioprodukten (Brot, Weißgebäck und Süßgebäck) auch Wert auf schonenden Umgang mit Ressourcen legt und daher versucht Überproduktion so gut als möglich zu vermeiden.
Ziel des Projekts war es, die zeitaufwendige und manuelle Bedarfsabschätzung für vier Filialen mithilfe von gezielter Datenaufbereitung, -anreicherung und -visualisierung zu unterstützen und somit den Prozess zu erleichtern.
In einem ersten Schritt wurden die für die Planung relevanten Informationen ermittelt, die bei der aktuellen Bedarfsabschätzung eine Rolle spielen. Basierend auf diesen Vorgaben wurde das erste prototypische PowerBI-Dashboards erstellt. Durch ein iterativ-inkrementelles Vorgehen wurde dieses in den nachfolgenden Schritten laufend weiterentwickelt und mit neuen Daten und Visualisierungen angereichert, während es bereits aktiv bei der Planung genutzt wurde. Diese enge Kooperation mit den Benutzern erlaubte es, neue Ideen und Vorschläge, die potenziellen Mehrwert für die Bedarfsabschätzung bringen, schnell zu integrieren und testen. Dazu zählte mitunter eine Einbindung von Wetter- und Feiertagsdaten sowie eine Aufschlüsselung der Verkaufsdaten in eine Wochen- und Tagesansicht, um bessere datengetriebene Entscheidungen zu treffen.
Das mit der Unterstützung von Test-before-Invest entwickelte finale Dashboard verringert die Komplexität des Planungsprozesses erheblich und bietet im Vergleich zur ursprünglichen Methode eine signifikante Zeitersparnis. Je nach Filiale war es möglich, die Überproduktion im Schnitt um bis zu 20 Prozent zu verringern, wodurch sowohl Ressourcen als auch Arbeitszeit in der Backstube eingespart werden konnten.

TBI 7: Ressourcenoptimierung (Energie und Material) durch automatisierten Datenabgriff und Auswertung an SYNCROMILL Q
Um Qualitätsschwankungen in der Feinbearbeitung von Aluminium bei der Fa. Hammerer Aluminium Industries zu vermeiden, wurde ein gemeinsames Projekt gestartet. Das TBI ermöglichte durch Abgreifen der Produktionsdaten eine Auswertung der Parameter und die Digitalisierung des Bearbeitungsprozesses. Mit dem Analysetool CYBERNETICS ANALYZE wurden die Produktionsdaten in Echtzeit abgegriffen und mittels Auswertealgorithmen für die Domänenexperten aufbereitet. Daraus wurden Handlungsempfehlungen zur Ressourcenoptimierung und optimalen Maschinenbelegung generiert.

TBI 9: Digitale Entwicklung im Ofenbau für Aluminiumguss
Ziel des Projekts war die Optimierung des Materialeinsatzes in der Herstellung von Schmelzöfen für Aluminiumguss bei gegebener Belastung unter Beibehaltung der Zuverlässigkeit, basierend auf Finite-Elemente-Simulation und normgerechter Festigkeitsbewertung. Hierfür wurden mehrere Software-Tools verwendet, wobei die Automatisierung und Koppelung eine Herausforderung darstellte. Eine Optimierung war aufgrund der festgestellten speziellen Eigenschaften des Systems vorerst nicht praktikabel, jedoch konnten konstruktive Maßnahmen abgeleitet sowie weitere Schritte identifiziert werden.

TBI 10: GlueMate – Situativer Kleberauftrag
Die PROFACTOR GmbH arbeitete an einer Machbarkeit die, die Realisierbarkeit eines automatischen, individuellen Kleberauftrags mit Roboter im Küchenmöbelbau untersucht.
Hierbei wurden folgend kritische Punkte erfolgreich geklärt:
- Eignung und Adaptierbarkeit einer manuellen Kartuschen-Pistole für den schutzzaunlosen Kleberauftrag in diesem spezifischen Fall im Hinblick auf eine Reduktion der Auftragsmenge und Verbesserung der Gleichmäßigkeit
- Erfassbarkeit und automatische Erzeugung von Roboterauftragsbahnen aus Bilddaten der individuellen Teileformate. Hierbei wurden die benötigten Unterlegehölzer mit Hilfe von KI-unterstützer Bildsegmentierung weggefiltert, sodass die erprobte Auflege-Methode nicht verändert werden muss.
- Durch die Kombination dieser Methodiken mit einem touchbasierten Bedieninterface konnte eine minimal notwenige Interaktionszeit von wenigen Sekunden für die individuelle Auftragseingabe nachgewiesen werden.
Die Ergebnisse dieser Untersuchung bestätigen die Machbarkeit der angestrebten Teilautomation. Voraussetzung hierfür ist aber die gezielte Kombination von Menschen und Roboter mit zusätzlichen Assistenztechnologien. Damit lassen sich auch in der bisher rein manuellen Herstellung von Unikatprodukten Verbrauchs, Kosten und Ergonomie-Vorteile erzielen. Daher ist eine Realisierung des Konzepts bereits in Planung

TBI 13: Hybrid quantum-classical optimization for the lot-sizing problem
Im Rahmen des Projektes wurde für die QMware Austria Gmbh, einem Anbieter von quanten-klassischen Cloudlösungen, ein Algorithmus zur Optimierung von Produktionsprozessen entwickelt. Konkret wurde ein hybrider quanten-klassischer Algorithmus zur Lösung des Lot-Sizing Problems in Kollaboration des Instituts für Wirtschaftsinformatik – Software Engineering und des Instituts für Produktions- und Logistikmanagement neu entworfen und implementiert. Die Implementierung des Artefakts erfolgte mithilfe des firmeneigenen Software Development Kits.

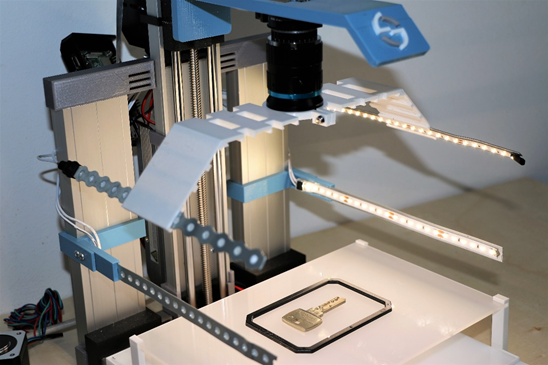
TBI 15: Smart Key Copy
Entrich Technologies sucht nach Methoden, mit denen ein Schlüssel auf Basis weniger Fotos klassifiziert und deren Features dekodiert werden können, so dass ein Schlüsseldienst aus diesen Daten ein Dublikat erstellen kann. Mit Fokus auf einzelne Fotos in einer kontrollierten Umgebung, wurden Algorithmen zur Schlüsselsegmentierung, -ausrichten und erkennung des Schlüsselbarts entwickelt. erste wesentliche Featurs wurden KI-basiert segmentiert, und helfen bei der Klassifikation der Schlüsseltype.
TBI 16: Measure the Pulse of the Process
Die Moldsonics GmbH entwickelt ultraschallbasierte Sensorlösungen für Spritz-gießwerkzeuge. Ziel des Projekts war einerseits der Test des Interface zwischen Messverstärker und Spritzgießmaschine, sowie die Durchführung von Versuchsplänen zur Datensammlung und Auswertung. Im Projekt wurde sowohl eine einfache Variante für das o.g. Interface erarbeitet, darüber hinaus wurden die Messdaten genutzt, um eine Messung der Fließfrontgeschwindigkeit im Spritzgießwerkzeug zu entwickeln. Damit erhält der Maschinenbediener über ein Display in Echtzeit die Informationen über die reale Fließfrontgeschwindigkeit.
TBI 18: Automatisierte optische Detektion von Ausschuss bei Trüffel mittels Deep Learning
Derzeit führt das Unternehmen TRUFO HUNGARY Kft. eine manuelle Sortierung von Trüffelscheiben durch, um Trüffel mit Qualitätsmängeln auszusondern. Ziel dieses Projekts war eine Machbarkeitsstudie, um zu klären, ob das Sortieren der Trüffel in Gut- und Schlechtteile mittels industrieller Bildverarbeitung durchgeführt werden kann. Im Zuge dieses Projekts wurde ein provisorisches optisches Setup für die manuelle Datenaufnahme von Prüf- und Musterstücken von Trüffeln aufgebaut und ein Deep Learning Modell erstellt, um die Machbarkeit der Fehlerdetektion bei Trüffeln zu prüfen. Das erstellte finale Modell klassifizierte bei 2425 Bildern 11 Bilder inkorrekt, was einer Genauigkeit von 99,5% entspricht. Somit ist eine optische automatisierte Trüffeldetektion mit einer hohen Genauigkeit möglich.

TBI 20: Maintenance and Measure to Log
Es wurde die serielle Kommunikationsschnittstelle der WPC2040 und WPC2030 Controller hardware- und softwareseitig auf die Möglichkeit zur Datenkollektion überprüft. Es wurde ermöglicht Maschinenparameter und Fehlermeldungen automatisiert abzugreifen sowie diese in eine Zeitdatenbank zu speichern, während die reguläre Funktion des Controllers nicht beeinträchtigt wird. Eine Benutzersoftware ermöglicht es Protokolle und Graphen von Parametern und Fehlern in unterschiedlichen Zeitintervallen zu erstellen.

TBI 23: Automatisierung der Konzeptionierungsphase
Die Produkte von GIG Karasek zeichnen sich durch ihre individuelle Anpassungsfähigkeit an die spezifischen Anforderungen ihrer Kunden aus. Ziel des Projekts war es die Konzeptionierungsphase mit dem Tool SyMSpace von LCM zu automatisieren.
Es wurden daher Komponenten implementiert, mit denen der Workflow von der Anfrage des Kunden (pdf) über die technische Berechnung und Kostenabschätzung bis zum Angebot (word) automatisiert wurden. Der menschliche Experte behält stets die entscheidende Rolle Designentscheidungen zu treffen oder die Berechnungen anzupassen.

TBI 21: Value-stream Integration Project
Ziel des Projektes war eine digital unterstütze Wertstromanalyse zu ermöglichen.
Dazu wurde eine neue Modellierungskomponente auf Basis von BPMN erstellt, die es erlaubt Wertströme in centurio.work zu modellieren und anzupassen. Die
erstellten Wertstrommodelle können simuliert ausgeführt werden.
Zusätzliche Infos, wie zum Beispiel Ressourcen, können aus einem Datenkatalog zumindest teilweise ausgelesen werden. Der modellierte Wertstrom kann als Basis für Arbeitspläne herangezogen werden. Es wurden auch bereits erste User Tests durchgeführt.

TBI 24: Potenzialanalyse Digital Production
Die gottschligg GmbH ist ein innovativer Hersteller von maßgeschneiderten Ladungsträgern. Im Projekt analysierte das Team der TU Wien die Produktionsprozesse der gottschligg GmbH auf Digitalisierungs- und Automatisierungspotenziale zur Effizienzsteigerung. Aufbauend auf den Ergebnissen der IST-Analyse wurde ein SOLL-Stand definiert. Ein Highlight war die Implementierung eines Schweißroboters zur Automatisierung eines Kernprozesses in der Produktion des Unternehmens.

TBI 25: Industrial Data Mesh – Analyse GAIA-X Integration
meshmakers.io bietet die Octo Mesh-Plattform zur Optimierung von Daten aus verschiedenen Quellen, wie z.B. Maschinendaten über Modbus und Scada. Zur Unterstützung dynamischer Lieferketten und Kooperationen wurde Gaia-X, eine europäische Initiative für föderierte sichere Datenräume, als Lösung für eine effiziente Datenspeicherung und den Austausch mit Partnern geprüft. Die Erkenntnisse aus dem Projekt bilden die Grundlage für meshmakers.io, um das Potenzial von Gaia-X für ihre Anwendungsfälle einschätzen zu können und weiterführende Forschungs- und Entwicklungsprojekte zu initiieren.

TBI 26: ArtCyberSecMap24
Das Partnerunternehmen ist ein digitalisierter KMU-Familien- und Produktionsbetrieb. IT-Systeme sind essenziell für den Betrieb, Herausforderungen der IT-Security aber ohne externe Unterstützung kaum zu bewältigen. Mittels eines Pilotprojekts zur Cyber-Security sollte die IT-Sicherheit– mit Fokus auf Verwaltung, Produktion & Entwicklung – systematisch gestärkt und dabei ein Rahmenwerk für eine systematische Vorgehensweise erstellt werden. Als Ergebnis wurden einerseits diverse Verbesserungsmaßnahmen durchgeführt. Andererseits steht nun eine Bestandsanalyse, angezeigt in einem IT-Security Dashboard, mit konkreten weiteren Maßnahmen in kritischen Bereichen zur Verfügung.

TBI 27: Exploration von LLMs zur Unterstützung von Testprozessen
Objentis untersucht das Potential von Large Language Models (LLMs) für die Übersetzung von natürlichsprachlichen Testfällen in ausführbare Sprachen. Motiviert durch Datenschutzanforderungen wurde der Schwerpunkt auf offene Modelle und Self-Hosting gelegt. Die Evaluierung verschiedener LLms (z.B. Llama 2, Mistral, Vicuna) in einem Testszenario zeigte, dass GPT4 derzeit überlegen ist, aber insbesondere Llama 2 70B nahe an der Baseline liegt. Mistral 7B lieferte trotz weniger Parameter ebenfalls gut Ergebnisse. Fine-Tuning und Promt Engineering wurde als Verbesserungsmethoden untersucht.

TBI 28: Digitaler Entladeassistent
Ein Auftragsfertiger im Bereich der Blechbearbeitung, zielt darauf ab, durch den Einsatz eines Augmented-Reality-Systeme seine Wettbewerbsfähigkeit zu steigern und Lieferzeiten zu verkürzen. Das System soll das effiziente Entladen von lasergeschnittenen Teilen unterstützen, wobei der Fokus auf der technischen Machbarkeit einer aktiven Visualisierung liegt, die direkt auf die Blechteile projiziert wird.
Die PROFACTOR GmbH befasste sich daher mit der aktiven Visualisierung mittels Multi-Projektor-Setup, technischen Machbarkeit, digitalen Integration für dynamische Bedienerführung, einem Labor-Demonstrator zur Konzeptüberprüfung und der Bewertung der Systemintegration.
Das Projekt umfasste die Untersuchung des bestehenden Prozesses, die Auswahl geeigneter Projektionshardware, die Entwicklung von Dateninterfaces, den Bau eines funktionsfähigen Modells, die Anpassung vorhandener Technologien und die Validierung in einer realen Umgebung.
Das von der PROFACTOR GmbH implementierte System kann zu einer verringerten Arbeitsbelastung für die Mitarbeiter führen, papierbasierte Prozesse eliminieren und klare visuelle Anweisungen für die Teilauswahl bieten, was die betriebliche Effizienz und Arbeitsbedingungen signifikant verbessert.


TBI 29: Automation and Reliability in 3D bioprinting
Die Ausgangssituation war der Prototyp eines 3D-Druckers zur additiven Fertigung von viskosen Biomaterialien. Um in Zukunft auch für inhomogene Materialien ein gleichmäßiges und reproduzierbares Druckergebnis zu erzielen, sollte der Prototyp mit einer aktiven Regelung ausgestattet werden. Der Drucker wurde um ein optisches Messsystem erweitert und ein Regler wurde programmiert. Versuche zur Evaluierung zeigen ein gutes Regelverhalten des Systems auf sprungförmige Änderungen der Eingangsgröße.

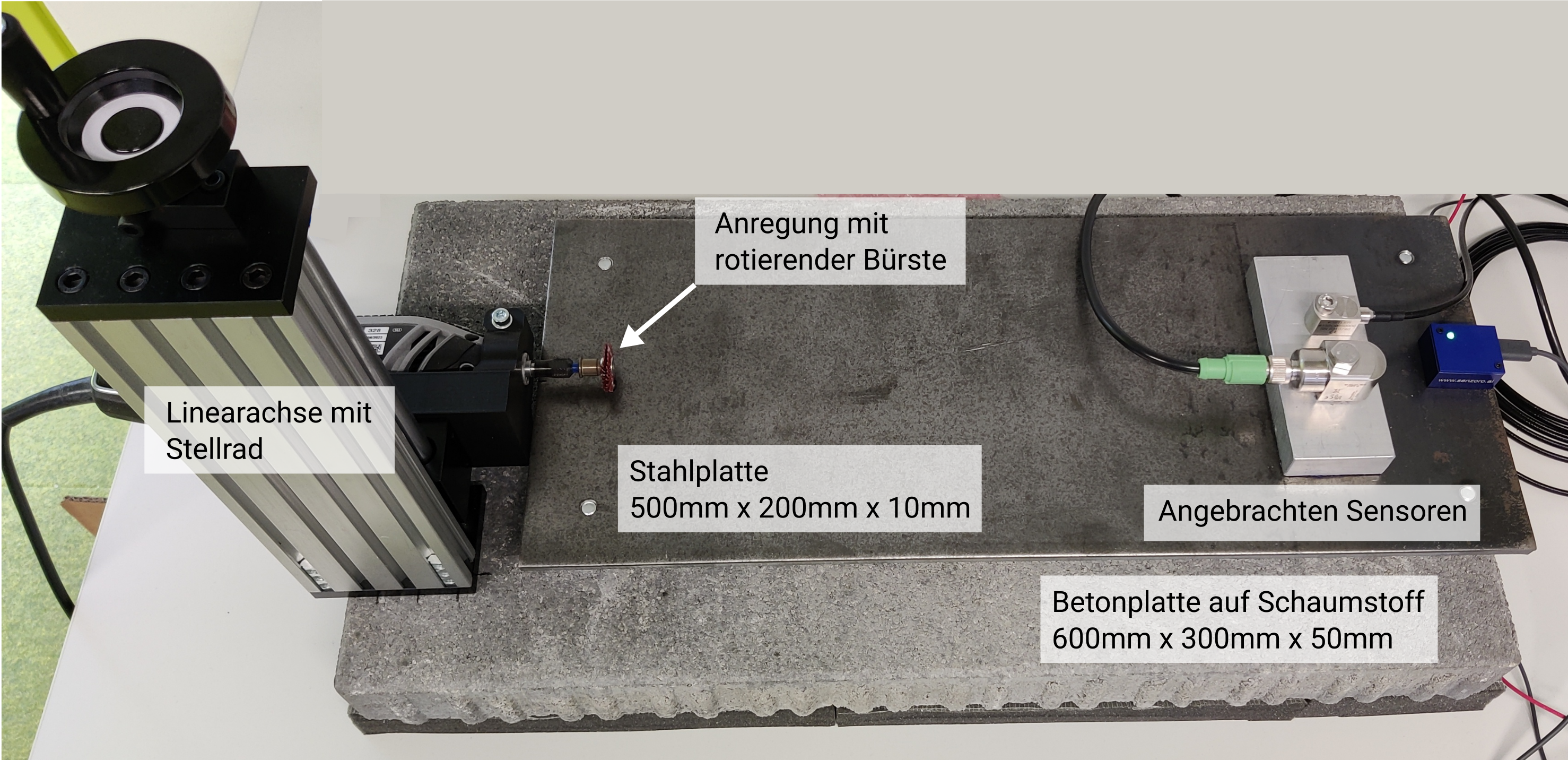
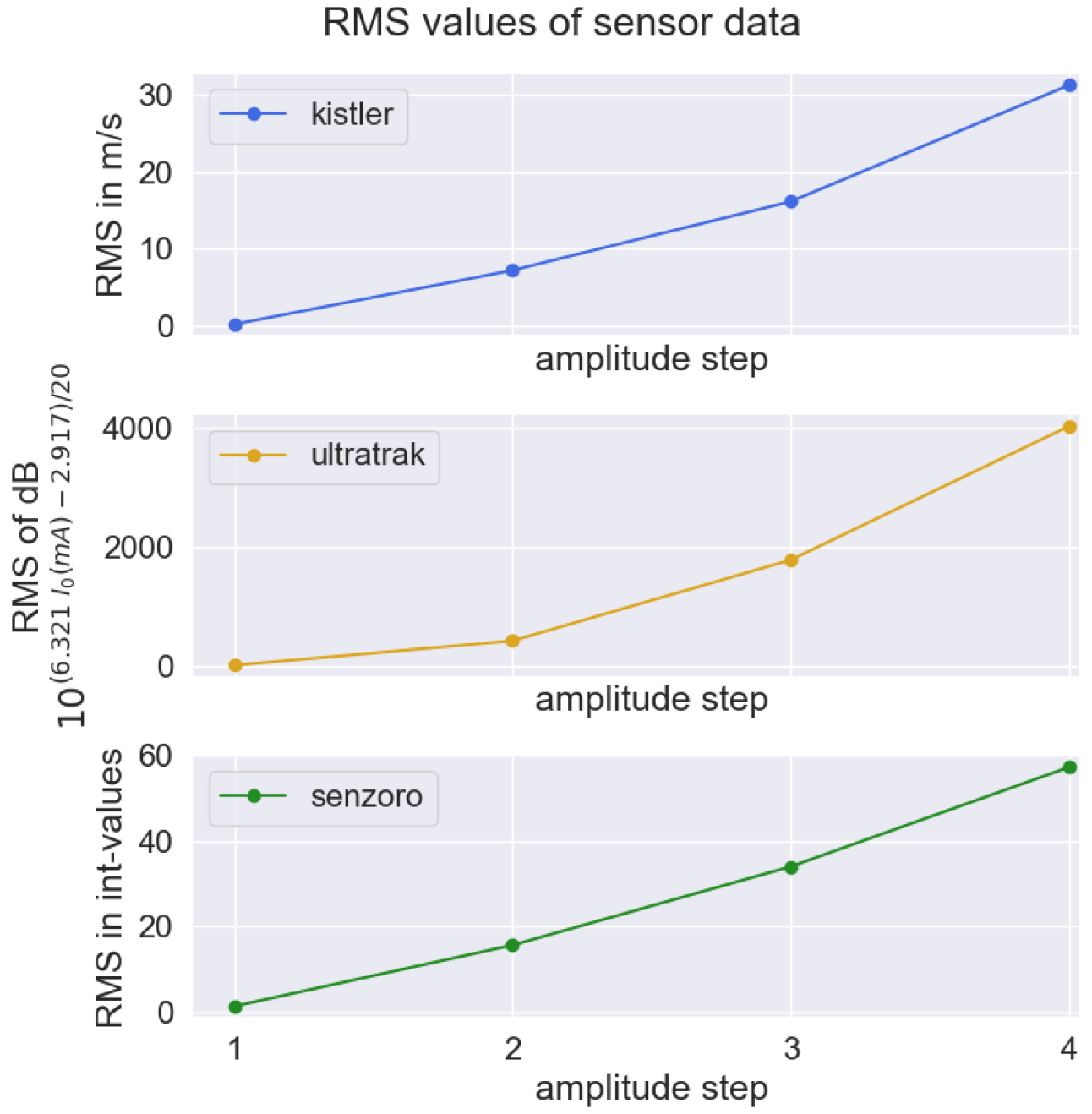
TBI 30: Feasibility study on acoustic sediment monitoring for hydro power applications
In Wasserkraftwerken können durch Umwelteinflüsse Sedimente in die Rohrleitungen gelangen und diese an der Anlage erhöhten Verschleiß verursachen. Es wurden fünf Sensoren ausgewählt, welche sich für Sedimentsmonitoring in Wasserkraftwerken eignen könnten. Dafür wurde ein geeigneter Sensorprüfstand aufgebaut, um die Sensoren unter definierten Bedingungen zu testen. Fast alle Sensoren, sind hinsichtlich Messbereich und Empfindlichkeit zur Messung der zu erwartenden Anregung geeignet und sollten für Sedimentsmonitoring auf realen Anlagen getestet werden. Dies wurde bereits von Global Hydro Energy GmbH in einem ersten Feldversuch auf einer realen Anlage gemacht.
TBI 31: Digitalisierung eines Energieeffizienzkonzepts mit Reportingfunktion
Ausgangssituation
Am Standort Gumpoldskirchen wurden die Energiedaten bisher manuell erfasst und die Berichterstattung erfolgte teilweise in schriftlicher Form. Abgesehen von kumulierten Energiemengen zu diskreten Zeitpunkten gab es keine ausreichend aufgelösten Verbrauchsdaten, was es schwierig machte, die Ursachen für Fehlverbräuche im Nachhinein zu identifizieren.
Im Rahmen der ersten Schritte zur Digitalisierung wurde ein Produktionsnetzwerk aufgebaut und größere Verbraucher mit digitalen Energiezählern ausgestattet, so dass diese automatisch über die Ignition SCADA Software ausgelesen und die Daten gespeichert werden können.
Ziele
Mit dem übergeordneten Ziel konkrete Energiekennzahlen für den Bereich des Walzwerks abzuleiten, sollte die Datenbasis hinsichtlich der Qualität der Energiedaten und verfügbarer Informationen zur Kontextualisierung dieser Daten geprüft werden. Der Einsatz von Energie sollte mit dem Ausstoß an Produkten des Unternehmens ins Verhältnis gesetzt und visualisiert werden.
Durchgeführte Arbeiten
Eingangs wurden die verfügbaren Daten geprüft und auf Verwendbarkeit bewertet. Im Weiteren wurde ein Auszug an Datenpunkten bestimmt um die Energieverbräuche im Walzwerk selbst und den infrastrukturell verbundenen Bereichen der Dampferzeugung und der Lösemittelrückgewinnung zu erfassen und ins Verhältnis zu setzen. Somit wird die gesamte Energie berücksichtigt, die beim Kalandrieren im Walzwerk verbraucht wird. Basierend auf ersten Erkenntnissen und als Vorgabe zur Produktionssteuerung, sollten die Kennzahlen spezifisch für die einzelnen Kalander im Walzwerk berechnet werden. Dies wurde exemplarisch für einen der Kalander durchgeführt. Hierzu konnte die kalanderspezifische Messung der dort verbrauchten elektrischen Energie direkt verwendet werden. Die Messungen der Verbräuche von Dampf im Walzwerk und in der Rückgewinnung, sowie von elektrischer Energie der Absauganlage, stellen jedoch über alle Kalander kumulierte Werte dar. Dementsprechend wurden Zustandssignale abgeleitet um die Energiemengen den einzelnen Kalandern zuordnen zu können.
Ergebnisse
Die Kalanderspezifischen Energiedaten erlauben eine weitere Kontextualisierung, womit sich letztendlich die vorgesehenen Kennzahlen ableiten lassen. Zum einen kann diese Energie einzelnen Walzvorgängen und damit Produkten, oder auch Chargen zugeordnet werden. Die verbrauchte Energie pro Charge wurde darüber hinaus auf das verbrauchte Material der jeweiligen Charge bezogen. Zum anderen kann der Energieverbrauch in folgende Kategorien eingeteilt werden:
- direkt wertschöpfend (Energieeinsatz unmittelbar für den
Produktionsprozess) - indirekt wertschöpfend (sonstiger Energieverbrauch betreffend für die
Produktion erforderliche Vorgänge) - nicht wertschöpfend (theor. vermeidbare Zustände)
Um es Anwendern auf einfache Weise zu ermöglichen diese Kennzahlen für ein vorausgewähltes Zeitfenster zu erstellen und zu Visualisieren wurde in der SCADA-Software Ignition ein entsprechendes Dashboard erstellt, siehe untenstehende Abbildung. So soll auch ermöglicht werden, etwaige Abweichungen erkennbar darzustellen. Z.B. wenn Chargen desselben Produkttyps hinsichtlich ihrer Energieverbräuche merklich voneinander abweichen. Im Gegensatz zur ursprünglichen Vorgehensweise der schriftlichen Berichtlegung der Energiedaten kann somit zeitgerecht auf Irregularitäten reagiert werden.

TBI 32: Simulated production line in foundry
Pinter Guss fertigt mit jährlich tausenden Tonnen Alu- und Kupfer-Legierungen, Bauteile im Sand- und Kokillenguss. Die Gießverfahren werden manuell durchgeführt, was zu Arbeitsbelastung, begrenzter Produktivität und potenziellen Sicherheitsrisiken führt. Um den Energieverbrauch und die Umweltauswirkungen zu reduzieren, beabsichtigt Pinter Guss, eine vollautomatisierte Produktionskette zu integrieren. Durch Simulationen und Digitalisierung konnten die Vorteile (bspw. 26% Materialeinsparung) und Machbarkeit der Integration aufgezeigt werden und weitere gemeinsame Entwicklungstätigkeiten initiiert werden.

TBI 40: Optische Personendetektion zur Optimierung von Fräsprozessen mit Portalfräßmaschinen
Die WENZEL Group GmbH & Co. KG ist Hersteller von Messlösungen und Fräsmaschinen. Bei den Produkten handelt es sich um Lösungen mit begehbarem Arbeitsraum, weshalb Sicherheit ein wichtiges Thema ist. Um die Zusammenarbeit zwischen Maschine und Bediener sicherer zu gestalten, sollte ein Personenerkennungssystem installiert werden, das vor gefährlichen Situationen warnt. Im Rahmen dieses Projektes wurde ein temporäres optisches Bilderfassungssystem an einer Ausstellungsmaschine installiert. Die aufgenommenen Bilder wurden verwendet, um Deep-Learning-Modelle zu erstellen, die erkennen, wann eine Person den Arbeitsbereich betritt. Das Ergebnis war, dass alle Personen erkannt wurden, wenn sie den Arbeitsbereich betraten. Dieses Ergebnis verspricht eine sichere Personenerkennung mit optischer Bildverarbeitung.

TBI 41: Digitales Konditionieren und Temperaturmanagement für geschlossene HPDC-Dosieranlagen
Der Einsatz des Meltec Vakuum-Dosiersystems bei Kunden hat gezeigt, dass die Randbedingungen der Produktionsumgebung einzelner Gießereien in der Praxis stark variieren. Das Ziel von DigiTeMa war daher die Entwicklung eines digitalen Dosierbehälters zur selbstständigen Temperaturüberwachung und Regulierung. Im Zuge des TBI wurde das Dosiersystem am Leichtmetallkompetenzzentrum Ranshofen (LKR) mit Temperatursensoren ausgestattet, die Steuerungssoftware hinsichtlich Temperatursteuerung adaptiert und das System erfolgreich validiert. Ein Highlight war die automatische Behälterentleerung, welche durch Erreichen einer zuvor exakt definierten Schmelzetemperatur ausgelöst wurde.
TBI 43: Empowering Non-Skilled Programmers
XOOO verbindet eine No‑Code‑Plattform mit Steuerungshardware, und ermöglicht die einfache Erstellung und Anpassung industrieller Prototypen und Applikationen.
Um die Usability weiter zu verbessern, wurde im Projekt versucht, relevanten Code via natürlichsprachlicher Interaktion zu erzeugen und in Produktivsystem automatisiert zu integrieren.
Ergebnis: lauffähige Pipeline und Integration in XOOO, nutzergetriebenes Feintuning sowie erste Untersuchungen der Steuerungshardware.

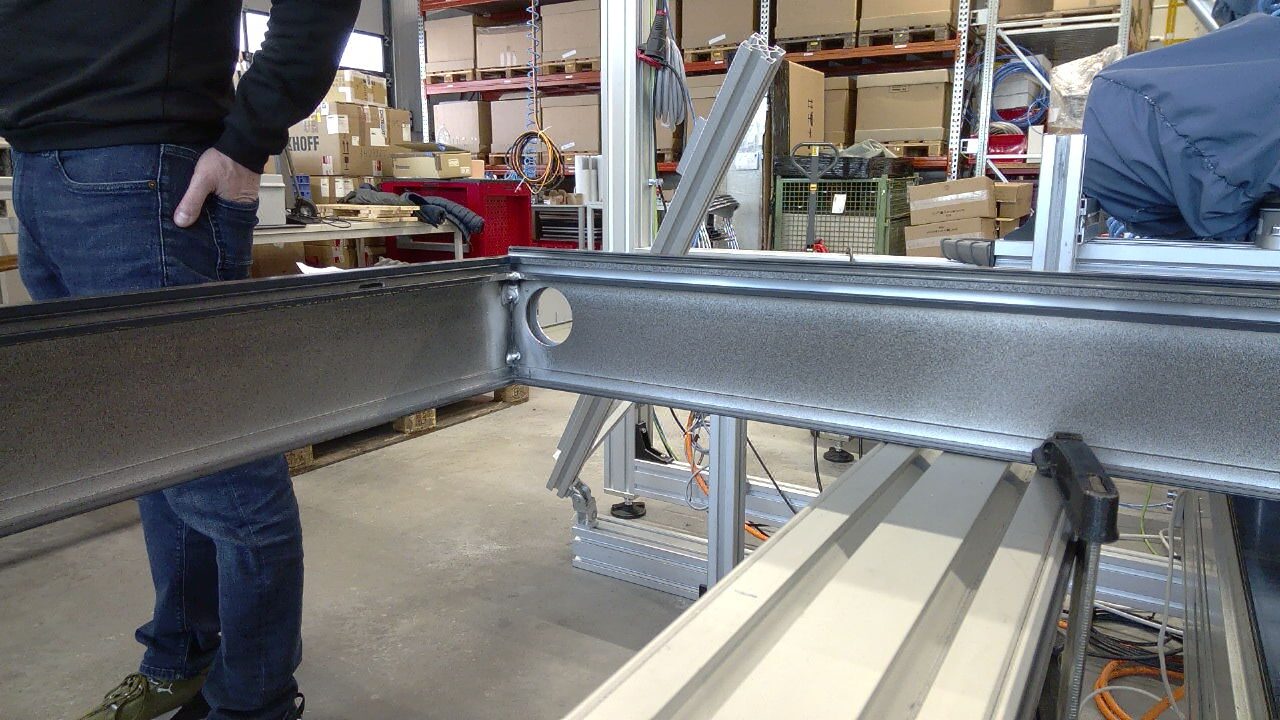
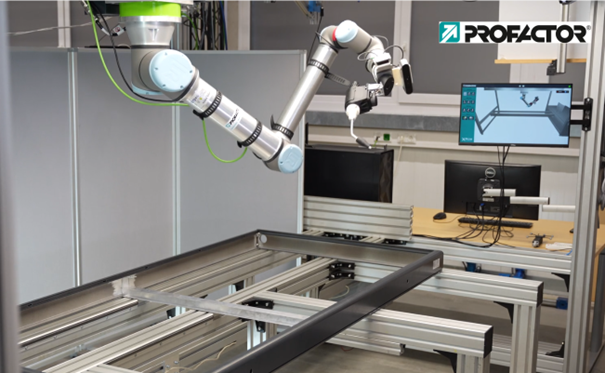
TBI 44: Roboterassistent für individuelles Rahmenschweißen von Solarkollektoren
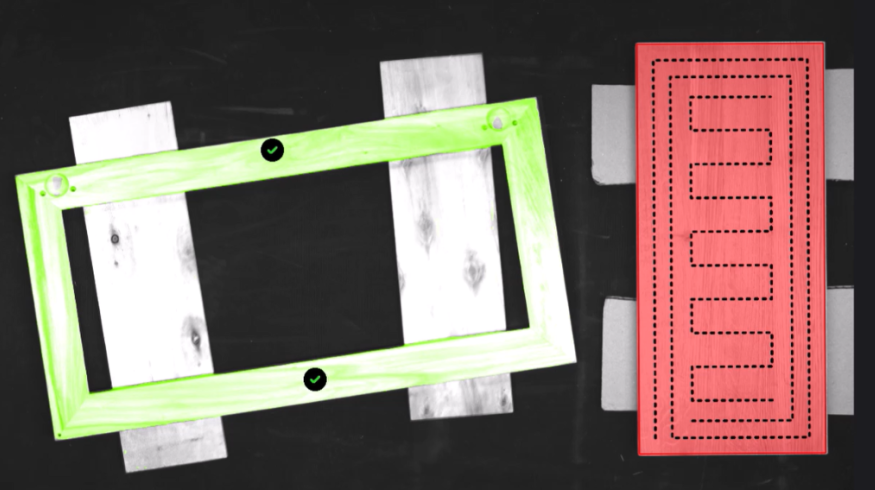
Bei der Herstellung von Solarthermie-Kollektorrahmen erfolgt das Verschweißen des Rahmens bei großen Kollektoren oder Sonderformaten nach wie vor per Hand. Aufgrund der steigenden Nachfrage nach Großkollektoren und Individualformaten (Rechteck, Dreieck, Trapez, …) in unterschiedlichen Größen sowie den absehbaren Engpasse beim Fachpersonal soll dieser Prozess künftig mit einem Roboter teilautomatisiert werden.
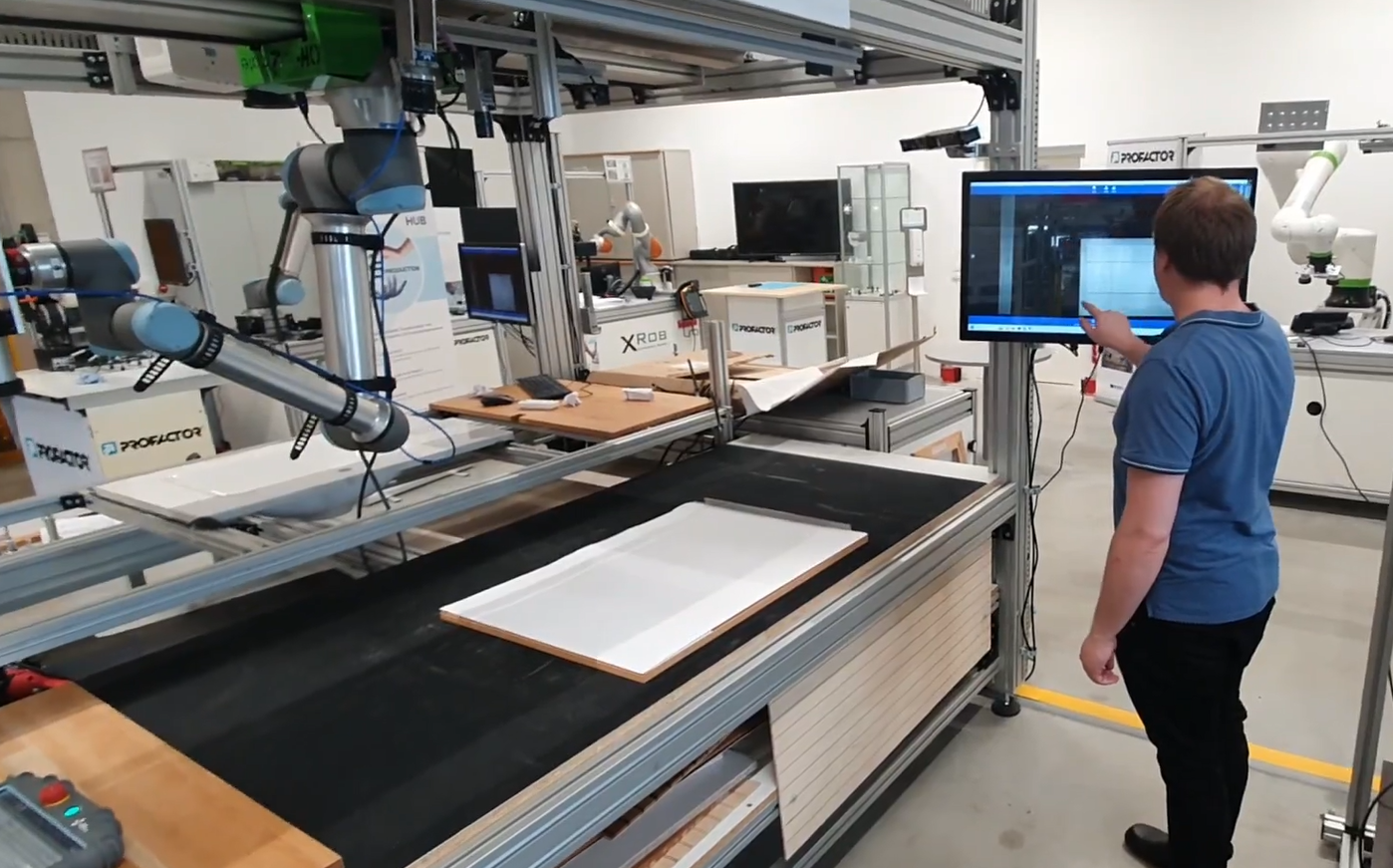
Im Rahmen dieses TBIs wurden nun hierfür die Machbarbarkeit des roboterunterstützen Fertigschweißen von Individualkollektoren untersucht. Hierfür wurde im Labor von Profactor ein Funktionsmuster mit Leichtbauroboter, Dummy-Schweißlanze und 3D- Kamerasystem aufgebaut. Die Untersuchungen erfolgten an eine speziell präparierten Demorahmen / Rahmenteilen, die Analyse verschiedener Winkelsituationen ermöglichten.
Zielsetzung hierbei war die teilautomatische Erfassung der situativ aufgespannten Rahmenformate und die automatische Berechnung der zugehörigen Schweißpositionen für die jeweilige Kollektorvariante. Dabei soll die Programmierung eines neuen Auftrags, auch wenn es sich um Unikatformat handelt, möglichst wenig Rüst/Parametrieraufwand (wenige Minuten) erzeugen.
Dazu wurden auch Methoden zur einfachen Eingabe von situativen Schweißaufträgen an für Unterständerungsrahmen (diese werden immer dem Gebäude und er Ausrichtung der Kollektoren angepasst) untersucht. Dies wird mittels Handführung des Roboterarmes in Kombination mit 3D sowie das Vorzeigen des Schweißpfads (grüne Linie) mittels getrackten Zeigestift und Projektion des Pfads erreicht.



TBI 45: Hawkeye
Fabriken und Industriezonen sind komplexe und teils gefährliche Umgebungen. Um die in Gefahrenzonen arbeitenden Menschen besser zu schützen, sollen Personen automatisch visuell in Videostreams erkannt werden. Das Projekt Hawkeye testet daher, ob Machine-Learning-Methoden zur Detektion von Personen in Kombination mit konventioneller 3D-Rekonstruktion dafür eingesetzt werden können. Hierfür wurde die Erkennung von Personen in Industrieanlagen in verschiedenen Extrempositionen erfolgreich getestet. Aus diesen Ergebnissen wurde eine Methode zur 3D-Verortung von Personen innerhalb des überwachten Bereichs entwickelt. Eine experimentelle Implementierung der Methode beim Unternehmenspartner demonstrierte erfolgreich die Anwendbarkeit des Verfahrens.
TBI 46: AI based menu engineering and sustainability
Ausgangssituation: Die Menüplanung von Gemeinschaftsverpflegung erfolgt oft erfahrungsbasiert, Risiko von Foodwaste und Wissensverlust (Stichwort Fachkräftemangel).
Ziele: KI-gestützte Vorhersagemodelle, Optimierung von Deckungsbeitrag & Nachhaltigkeit.
Durchgeführte Arbeiten: Datenaufbereitung, Analysen, Prototypen mit Vorhersagemodellen, NLP/LLM-Tests.
Ergebnisse: Machbarkeit bestätigt, erste Prognosen & Features umgesetzt.
Highlights: Auswirkung von Corona sichtbar in den Datenanalysen, KI-basierte Menüanalysen, LLM-gestützte Metadaten.

TBI 47: Erstellung eines Simulationsmodells zur digitalen Abbildung seines physischen Systems als Referenzmodell für ein bestehendes Vergleichsmodell
Die CDP Center for Digital Production GmbH erstellt in Kooperation mit der HÖRMANN Klatt Conveyors GmbH ein Simulationsmodell, welches den Stand der Technik eines fördertechnisches Systems abbildet so wie den Waren- und Personenfluss simuliert. Der modulare Aufbau des positiv validierten Modells ermöglicht einen hochflexiblen Einsatz und erlaubt verschiedene, unterschiedliche Systeme miteinander zu vergleichen, Analysen durchzuführen und weitere Entwicklungsschritte einzuleiten.

TBI 48: Digitale Auflegeschablonen für Stabdecks
Zur Herstellung von Stabdecks für Boote wurden bisher physische Schablonen verwendet, was hohe Aufwände für Lagerung, Transport und Handling verursachte. Das Projekt zielte darauf ab ein System zu evaluieren, dass diese Schablonen durch ein digitales System ersetzt. Druch die Entwicklung und den Test eines Prototyps konnte im Labor und wor Ort erfolgreich gezeigt werden, dass der Aufwand für physische Schablonen erheblich reduziert und die Auflegezeiten deutlisch beschleunigt werden können. Der Prototyp eliminierte Nebenzeiten durch direktes Anzeichnen, was eine signifikante Verbesserung der Effizienz und Machbarkeit für eine zukünftige Implementierung darstellte. Dieses innovative System demonstrierte eindruckswoll sein Potenzial, die Produktion moderner und effizienter zu gestallten.

TBI 49: Machbarkeit – Einsatz von ROS2 im PAK-Datenerfassungssystem
Um einen stabilen Betrieb sicherzustellen, verwendet das aktuelle PAK-System einen eigenen Prozess für die Bahnplanung und Robotersteuerung. Die Schnittstellen zu den verwendeten Algorithmen sind in der Regel geschlossen, was zeitgemäße Erweiterungen oder Anpassungen erschwert.
Das Ziel besteht darin, zu evaluieren, ob und wie ROS2, das im Robotikumfeld eingesetzt wird, genutzt werden kann. ROS2 wurde gewählt, weil es den einfacheren Transfer von F&E-Ergebnissen und Softwarefunktionen in die Industrie ermöglicht.
Im Rahmen des Projekts bestand der erste Schritt darin, zu analysieren, welche Komponenten von ROS2 davon profitieren würden. Es stellte sich heraus, dass ein bestimmter Algorithmus zur 3D-Mesh-Generierung effektiv durch Alternativen ersetzt werden konnte – auch ohne ROS2. Mehrere Ansätze wurden analysiert und auf methodische Korrektheit überprüft.
Anders verhält es sich bei Algorithmen, die eine Modellierung von Robotern erfordern. Es wurde festgestellt, dass die standardisierte Roboter-Modellierung (Kinematik, Kollisionsmodelle), die von ROS2 bereitgestellt wird, verwendet werden kann. Weitere ROS2-Komponenten zur Bahnplanung könnten ebenfalls als Grundlage für den eigentlichen Algorithmus dienen. Dies zeigte, dass die bestehende Entwicklung vollständig auf ROS2 umgestellt werden kann. Ein weiteres Ergebnis ist, dass bei der Auswahl der Implementierung besonders auf Open-Source-Lizenzen geachtet werden muss, da nicht alle für den praktischen Einsatz geeignet sind.
TBI 50: Digitalisierung Paketannahme Machbarkeit
konzeption eines digitalen Assistenten für die Paketannahme/-abgabe, welcher Pakete visuell erkennen, zuordnen und verfolgenkann. So sollen zukünftig, anstelle von verschließbaren Boxen, offene Regalsysteme in beispielsweise Mehrfamilienhäusern zum Einsatz kommen können. Als Kernelement fehlt derzeit wahrnehmungstechnisch eine geeignete Technologie zur Erkennung von Paketen in Farbbildern. Ziel dieses Projekts ist die methodische Adaption von Erkennungsalgorithmen aufdie Paketannahme/-abgabe Situation und deren Bewertung mittels eines Labor Demonstrators.
Im Rahmen dieses Projekts befasste sich die PROFACTOR GmbH mit a) der Erstellung eines definierten Trainings/Test- Datensets auf Basis des Labor Prototypen, b) der Entwicklung dreier unterschiedlicher Erkennungsalgorithmen auf Basis von Neuronalen Netzen c) der Evaluierung der Modelle in Bezug auf Laufzeit und Erkennungsrate und d) der Erstellung eines API zur Integration. Wir konnten gemeinsam zeigen, dass die von PROFACTOR GmbH entwickelten Methoden komplexe Paketsituationen auch bei schlechten Lichtverhältnissen und unkalibrierten Kameras korrekt erkennen können. Eine Echtzeitverarbeitung der Daten ist durch die geringe Laufzeit der Modelle ebenso möglich. Aufgrund der vielversprechenden Ergebnisse ist PROFACTOR in Abstimmung zu einem potenziellen Nachfolgeprojekt.





TBI 51: CarbonCompetence – Augmented Reality meets Diamond Thin Film Technology
Untersucht wurde die Entwicklung und Implementierung eines Augmented Reality (AR)-Systems zur Unterstützung von Wartungs- und Reparaturarbeiten im Kontext der Anforderungen von CC. Ein AR-Prototyp wurde erfolgreich entwickelt und von 5 Expert:innen getestet. 3 potenzielle Einsatzbereiche wurden identifiziert: Instruktionen, Übungen und Gamification. Die Umsetzung eines AR-Systems wäre für CC sinnvoll in 3 Bereichen: Training (insb. von Wartungstätigkeiten), Assistenz (bei Wartung und Reparaturen) und Qualitätssteigerung (insb. bei Routinearbeiten).

TBI 53: AI 4 Profile Similarities
Zur Optimierung des Herstellingsprozesses von Metallprofilen sollte eine Ähnlichkeitssuche über die Form der Profile entwickelt werden. Die Wahl des Zugangs fiel auf neuronale Netze, die auf String-Repräsentationen der Profiltopologie operieren. Die Ergebnisse wurden stichprobenartig visuell sowie statistisch anhand von „Ziel-Rankings“ ähnlicher Profile evaluiert. Das System am Ende des TBI zeigt statistisch vielversprechende, aber visuell noch unzureichende Resultate. Es wurden im Schlussreport Möglichkeiten aufgezeigt, welche Wege für eine Verbesserung des Systems in Frage kommen.
TBI 55: Digitale Prozesstechnologie für Sensorchip-Integration
TissUse untersucht derzeit einen Wandel in seiner Produktionsmethodik für Mikrofluidik durch die Umstellung von PDMS basierten Technologien zu einem PDMS-freien Ansatz (COC). In diesem PDMS-freien Ansatz sollen silizium-basierte Sensoren direkt in die Kunststoffsubstrate integriert werden. PROFACTOR hat dies in der folgenden Test-Before-Invest Studie untersucht mittels eines NIL Pick&Place Ansatzes inklusive der Integration von leitfähigen Bahnen inkl. Passivierung direkt auf den COC Substraten mittels Tintenstrahldruck

TBI 56: Dachscanner für Schienenfahrzeuge
Bei Arbeiten am Zug in einer Werkhalle kann es dazu kommen, dass z.B. Werkzeuge am Dach vergessen oder Klappen nicht geschlossen werden. Ziel ist es, hier die Sichtkontrolle durch Menschen um eine automatische Kontrolle zu ergänzen.
Für diese Anwendung wurden getestet:
- Bildbasierte Messungen
- Low-cost LiDAR und Rangecameras
- Industriemesstechnik (3DPIXA)
Auf Basis unserer Ergebnisse können wir fundierte Empfehlungen für Folgeprojekte geben.

TBI 58: Simulation-based design of PVC profile extrusion lines
-
Auslegung von Profilextrusionswerkzeugen über Erfahrung, aufgrund Überarbeitungsschritte zeit- und kostenintensiv
-
Ziel ist Aufbau eines robusten Modellierungssetups in Ansys Fluent zur Vorhersage der Strömung in einem Profilextrusionsprozess
-
Durchgeführten Arbeiten: Überarbeitung Geometrie, Vernetzung, numerische Simulation mit unterschiedlichen Modellen, Berechnung Geschwindigkeitsverteilung und Druck, rheologische Charakterisierung des Materials
-
Ergebnis ist ein hochwertiges Netz und Simulationssetup zur exakten Vorhersage der Düsenströmung
TBI 59: bionyx.e2e sandbox suite
ekey, ein Hersteller von biometrisch gesicherten Zutrittssystemen, legt hohen Wert auf Qualität und Sicherheit. Testen des Systems ist ein wichtiger, aber aufgrund der Komplexität und Konfigurationsvielfalt aufwändiger Schritt in der Qualitätssicherung. Besonders die mobile App muss in Kombination mit dem Backend intensiv manuell getestet werden, was einen hohen Ressourcenaufwand bedeutet.
Gemeinsam mit dem SCCH hat man sich zum Ziel gesetzt Automatisierungsmöglichkeiten in der Qualitätssicherung zu untersuchen, um damit Tester von repetitiven, eintönigen Aufgaben zu entlasten. Das konkrete Umsetzungsziel war die prototypische Implementierung eines automatisierten, vom Backend isolierten Testfalls der mobilen App in der Build-Pipeline.
Ein automatisierter Testfall konnte erfolgreich vom SCCH implementiert werden, der als Vorlage für zukünftige Tests dient und die Einführung moderner Methoden wie Model basiertes Testen und AI-basierte Testgenerierung ermöglicht.
Das Potential für zukünftige Entlastung von manuellen Testressourcen konnte gezeigt werden und kann von ekey, mit dem Ziel auch in Zukunft effizient, schnell und kostengünstig hohe Qualität zu gewährleisten, weiter ausgebaut werden.

TBI 60: Vorbereitung eines digitalen Zwillings einer Fördertechnikanlage
Ausgangspunkt war die mangelnde Effizienz bestehender Förderanlagen durch fehlende digitale Planungswerkzeuge. Ziel war die Entwicklung eines digitalen Schattens als Vorstufe zum digitalen Zwilling. Es wurden Simulationsmodelle erstellt, Schnittstellen entwickelt und ein funktionaler Prototyp umgesetzt. Das Projekt zeigte die Machbarkeit auf und legte die Basis für Folgeprojekte zur digitalen Transformation
TBI 61: Digital and Interactive Heating for Tundish
Beim Stranggießen ist es entscheidend, den Wärmeverlust zu Beginn der durch die Gießrinne sowie äußeren Einflüssen, wie Luftströmungen oder Umgebungstemperaturen entsteht, möglichst entgegenzuwirken. Andernfalls kann es im Extremfall zu Gießabbrüchen kommen. Mithilfe eines Heizgeräts und der digitalen Aufzeichnung der Schmelztemperatur in zwei Gießversuchen soll ein digital geregeltes Heizsystem entwickelt werden. Während den Versuchen konnten keine eindeutigen Ergebnisse zur Wirksamkeit des Heizgeräts ermittelt werden. In zukünftigen Gießversuchen ist vorgesehen, Heizelemente mit höherer Leistung zu testen, um deren grundlegende Wirksamkeit systematisch zu untersuchen.

TBI 64: Erweiterte Anpassungsfähigkeit und
Effizienzsteiqerunq in der Abkanttechnologie
Salvagnini entwickelt und produziert Abkantautomaten für die Blechbearbeitung. Die stetig steigenden Kundenanforderungen an Qualität und Effizienz erfordern neue Konzepte zur Genauigkeitssteigerung, Prozessbeschleunigung und vollautomatischen Produktion mit Losgröße 1.
Die Einhaltung der geforderten Toleranzen bereits beim ersten produzierten Teil ist aufgrund variabler Geometrien und Materialeigenschaften äußerst komplex. Trotz der Einführung einer automatischen Materialkompensation bleibt besonders die Verarbeitung von Spezialmaterialien eine signifikante Herausforderung im Produktionsprozess.
Ziel ist die Entwicklung eines “Simulation as a Service”-Konzepts zur virtuellen Maschinenanpassung und Optimierung, das den ineffizienten Trial-and-Error-Ansatz durch eine adaptive Lösung ersetzen soll.
Dafür wurde von LCM ein parametrisiertes Simulationsmodell mit einer Open-Source Finite-Element-Software für eine Cloudumgebung entwickelt. Mittels eines automatisierten Workflows können damit optimale Maschinenparameter für den Biegeprozess ermittelt werden.
Dadurch lässt sich die Ausschussteilproduktion deutlich reduzieren.

TBI 65: KI-trainierter Steuerungsalgorithmus für die Fortbewegung eines Hexapod-Laufroboters
Die Firma LXRobotics aktualisiert derzeit die Steuerung eines Roboters mit 6 Beinen (Hexapod), um z. B. in unwegsameren Umgebungen oder bei unvorhersehbaren äußeren Einflüssen stabiler zu werden.
Dieses Projekt konzentriert sich daher auf die Entwicklung einer solchen Steuerung, wobei auf Methoden der Künstlichen lntelligenz (Kl)
zurückgegriffen wurde. Diese Algorithmen wurden auf die Vorgaben abgestimmt und erzielten zu verschiedenen Aufgabenstellungen vielversprechende Ergebnisse, beispielsweise einen Weg mit mehreren Richtungsänderungen zurücklegen.

TBI 67: Optimierte Produktionsplanung mit Hilfe von Cross-Lists
Im Test Before Invest – Projekt des European Digital Innovation Hub (EDIH) AI5production wurde von der Software Competence Center Hagenberg GmbH und der RECOM Engineering GmbH & CO KGan einer Machbarkeit für ein automatisiertes Auslesen von Produktdaten aus Bauteil-Datenblättern mittels Large Language Modellen (LLMs) gearbeitet.
Aktuell werden Produktdaten elektronischer Kleinbauteile, wie z.B. DC/DC- oder AC/DC-Wandler, aus technischen Datenblättern manuell in Excellisten übertragen und gepflegt. Dies dient zur Vergleichbarkeit ähnlicher Bauteile, um beispielswiese in der Lieferkette fehlende Bauteile durch lagernde gleichwertige Produkte zu ersetzen. Allerdings ist dieser Prozess äußerst zeitaufwendig und erfordert geschultes Personal. Ziel dieses Projekts war es daher, durch automatisiertes Auslesen von Produktdaten die Effizienz zu steigern, eine einfache und schnelle Reaktion auf Marktschwankungen zu ermöglichen sowie den Umstieg auf vergleichbare Produkte zu erleichtern.
Dazu wurde das Potential von LLMs zur automatisierten Extraktion von Bauteilwerten aus Datenblättern analysiert. Es wurde eine modulare Data Pipeline implementiert, welche es ermöglicht, mehrere LLMs modular austauschbar zu testen. Zuerst wurden die Datenblätter vorverarbeitet und mittels DL Object Detection Modellen das Layout analysiert um das PDF in Text, Tabellen- und Graphik-Abschnitte unterteilen zu können. Zur Informationsextraktion aus den Dokumentenabschnitten wurden drei Open-Source LLMs sowie das kostenpflichtige GPT4o Modell von OpenAI getestet. Erste Analysen zeigen ein hohes Potential bei der Text– und Tabellenauswertung an. Die Auswertung von Funktionsgraphen gestaltet sich derzeit noch als herausfordernd, bietet jedoch vielversprechende Ansätze für zukünftige Entwicklungen.

TBI 68: Modellbasierte Analyse eines Gasdurchflusssensors für Wasserstoffanwendungen
In diesem Projekt wurden die Möglichkeiten digitaler Entwicklungsmethoden an einem konkreten Beispiel von mlu-recordum demonstriert. Ziel dabei war die Erweiterung des Funktionsumfangs eines bestehenden Systems. Dazu wurde das betrachtete System mittels CFD Simulation untersucht und in der Folge das Design schrittweise weiterentwickelt. Abschließend wurden fluiddynamische Parameter des finalen Designs mittels Simulation quantitativ genau bestimmt und durch Messungen bestätigt.
TBI 69: RebarTwin: Segmentierung von BewehrunQsstrukturen
Damit Beton großen Kräften standhält, werden Bewehrungsstrukturen eingearbeitet. Vor dem Betonieren wird geprüft, ob diese mit der Planung übereinstimmen. Dazu wird eine Punktwolke rekonstruiert und die Bewehrungsstäbe als separate Objekte extrahiert. Verwendet wurde ein Ansatz aus „Cylinder Fitting“ und „Region Growing“, unterstützt durch bildbasierte KI, die die Punktwolke so filtert, dass nur die Bewehrung übrigbleibt. Während der Evaluierung konnten Bewehrungsstrukturen rekonstruiert werden.

TBI 70: Automatisiertes Kontaktieren von gebrauchten PV-Modulen
2ndCycle baut aktuell eine vollautomatische Anlage zur Überprüfung von gebrauchten PV-Module auf. Im TBI-Projekt konnte gezeigt werden, dass es möglich ist, ausschließlich mit Videodaten die Kabel der Module zu erkennen und zu greifen. Im Anschluss verfährt der Roboter entlang des Kabels, bis das Ende des Kabels und die Polarität des alten Steckers erkannt wird. Für die Erkennung des Kabels und der Stecker wurde eine KI mit Fotos antrainiert und ausschließlich auf open source Lösungen zurückgegriffen.

TBI 71: Machbarkeitsanalyse – Simulation Plattenhandlingsystem für Zuschnittanlagen
Durch die Simulation eines bisher manuellen Handlingprozesses von Aluminiumplatten sollten die Auslastungsmöglichkeiten durch eine Automatisierungslösung dargestellt werden. Ein Vergleich zwischen Ist- und Soll-Zustand wurde vorgenommen. Es konnte gezeigt werden, dass durch einen automatisierten Prozess weniger Anlagen zur Abarbeitung einer bestimmten Anzahl an Schnittplänen benötigt werden. Die Visualisierung der geplanten Abläufe mit der Darstellung der Kenngrößen wie Materialfluss, Taktzeiten, Engpässe und Auslastung der Anlagenkomponenten wurde in mehreren Entwicklungsschleifen angefertigt und in Abstimmung weiter optimiert

TBI 72: Traceability-System mit Visualisierung
CSABAcast implementierte mit Fill ein Traceability-System zur digitalen Rückverfolgbarkeit von Aluminiumbauteilen mittels Data-Matrix-Codes. Das System erfasst Prozessparameter, visualisiert Daten via Webinterface und analysiert Qualitätskennzahlen. Die Ziele der Ausschussreduktion und Effizienzsteigerung wurden erreicht, wobei sich die Transparenz in der Produktion deutlich verbesserte und Qualitätsmängel schneller identifiziert werden können.

TBI 73: Digitale Weiterentwicklung einer multifunktionalen Schüttgutfräse
In diesem Projekt wurde die Strömung eines Sand-Luft Gemisches im Auswurfkamin der Schüttgutfräse „Fräsinator“ untersucht. Nach einem Vergleich des simulierten Auswurfverhaltens mit realen Versuchen des bestehenden Systems wurden konstruktive Verbesserungen virtuell getestet. Dabei wurde gezeigt, wie wichtige Anforderungen für die zukünftige Serienproduktion erreichbar sind, insbesondere die bessere Fokussierung des Auswurfs und eine höhere Wurfweite. Der Aufwand für reale Versuche konnte durch das virtuelle Testen erheblich reduziert werden.

TBI 74: Mathematische Modellierung des Geschäftsmodels der ERA
Das Projekt unterstützte ein österreichisches Sammel- und Verwertungssystem für Verpackungen bei der Optimierung ihrer Risikoabschätzung. Ziel war eine präzisere Berechnung des Risikodepots durch Analyse von Wechselwirkungen zwischen Kosten-, Mengen- und Preisvariablen. Mithilfe statistischer Methoden und ARIMA (Auto Regressive Integrated Moving Average)-Modellen wurden realistischere Szenarien und Prognosen zu Preisstreuungen entwickelt, wodurch die finanzielle Planungssicherheit und langfristige Stabilität des Unternehmens deutlich verbessert wurde.
TBI 75: 60 GHz IIoT Radarsensor mit BLE-Kommunikation zur Wasserstandsmessung in Flüssen und Kanälen
Für die Wasserstands-Messung in Flüssen und Kanälen soll ein 60 GHz IIoT Radarsensor mit BLE-Kommunikation entwickelt werden. Für die bereits bestehende Hardware sollte im Zuge dieses Projektes die Firmware konzipiert und in weiterer Folge implementiert werden, um eine möglichst energieeffiziente, sichere und drahtlose Datenerfassung via BLE zu ermöglichen.
Die Firmware für den IIoT Radarsensor wurde entsprechend den Anforderungen implementiert, wobei ein großer Fokus auf das Powermanagement gelegt wurde, um den Energieverbrauch zu minimieren. Zusätzlich wurde für die Anpassung der Applikation an die entsprechenden Umweltbedingungen eine Konfigurationsschnittstelle vorgesehen.

TBI 76: Machbarkeitsstudie „CFD Simulation als Digitales Service für Entwicklung und Produktion“
Im Sinne einer Machbarkeitsstudie wurde HAUSER über ein Web-Interface ein Prototyp zur automatisierten Remote-Berechnung eines vereinfachten CFD-Simulationsmodells für ein Kühlmöbel zum Testen übergeben. Der Prototyp wurde von LCM in der Open-Source-Software OpenFOAM so gestaltet, dass er auch für Nicht-Simulationsexperten auf Basis von „simulation on demand“ zugänglich ist. Damit wurde HAUSER bei der Strategiefindung zum Einsatz von Simulation in der Entwicklung von Kühlmöbeln maßgeblich unterstützt.

TBI 77: Digitalisierung in der Fertigung von Tiefziehformen
Die Polleres Plastic gehört zu den modernsten Herstellern Österreichs von tiefgezogenen Kunststoffteilen im Food- und Nonfood-Bereich. Die Aluminiumformen für die Tiefziehteile werden zum gegenwärtigen Zeitpunkt in konventioneller Form (subtraktiv) durch einen externen Formenbauer gefertigt. Tiefziehformen weisen neben Kühlkanälen auch Vakuumkanäle auf. Die für den Tiefziehprozess optimale Formgeometrie kann mit subtraktiven Fertigungsverfahren nicht hergestellt werden.
Im Rahmen des Test before invest wurde untersucht, ob eine Digitalisierung der Fertigung der Tiefziehformen mittels 3D-Druck möglich ist und dies auch direkt bei der Fa. Polleres durchgeführt werden könnte. Vor allem ging es darum die digitale additive Fertigungsmethode „Metall-3D-Druck“ für die Fa. Polleres und deren Anwendungsfeld zu evaluieren. Zu diesem Zweck wurden Versuchsreihen durchgeführt und evaluiert. Es hat sich gezeigt, dass die digitale Metall-3D-Druck-Technologie eine sinnvolle Investition für die Fa. Polleres darstellt.

TBI 78: Simulationstudie zum Desing von Gaseinblasung in Feststofförderung
In diesem Projekt wurde die zweiphasige Strömung (pneumatische Förderung von Wüstensand) im Auswurfkamin der Schüttgutfräse „Fräsinator“ von NG Green untersucht. Nach einem Vergleich des simulierten Auswurfverhaltens mit realen Versuchen des bestehenden Systems wurden konstruktive Verbesserungen virtuell getestet. Dabei wurde gezeigt, wie wichtige Anforderungen für die zukünftige Serienproduktion erreichbar sind – insbesondere die Erhöhung der Auswurfweite. Der Aufwand für reale Versuche konnte durch das virtuelle Testen erheblich reduziert werden.

TBI 79: Anbindung von IIoT-Sensorknoten über ein EdgeGateway an PASO-Solutions
Ein bestehendes Sensorsystem zur Erfassung von Echtzeit-Beschleunigungsdaten soll in die Softwareumgebung des Unternehmens integriert werden. Eine besondere Herausforderung besteht darin, mit den entstehenden großen Datenmengen umzugehen. Neben der drahtlosen Anbindung der Sensoren soll daher auch eine Filterung und Vorverarbeitung auf einem EdgeGateway implementiert werden.
Es wurden Mechanismen zur Konfiguration von Einzelsensoren, von Sensor-Flotten und zur Bereitstellung der Systemkonfiguration umgesetzt. Mithilfe einer Whitelist ist eine selektive Anbindung der Sensoren an das EdgeGateway möglich. Als Basis der standardisierten und transparenten Protokollimplementierung wurde ein textbasiertes JSON-Format verwendet. Zur Erhöhung der Datensicherheit wird das serielle Protokoll codiert übertragen. Zusätzlich wurde eine verschlüsselte Kommunikation mit dem Clouddienst realisiert.

TBI 80: Technologie Screening für die (inline) Erfassung von Grenzflächen- und Oberflächendefekten in der Co-Extrusion von verstreckten Mehrschichtfolien
Die zuverlässige Erkennung von Grenzflächen- und Oberflächendefekten in coextrudierten Folien stellt eine technische Herausforderung dar, da herkömmliche Methoden häufig an ihre Grenzen stoßen. Ziel des Projekts war die Evaluierung und Optimierung geeigneter Messverfahren zur Qualitätskontrolle. Verschiedene Technologien wurden hinsichtlich Sensitivität, Wirtschaftlichkeit und Integrationsfähigkeit analysiert. Die Ergebnisse zeigen, dass keine Methode ohne Anpassung optimal ist, jedoch vielversprechende Lösungsansätze identifiziert wurden.
TBI 81: Seamless integration of electronic islands on CondElastX
Das elastische und leitfähige CondElastX-Band soll mithilfe digitaler Drucktechnologien weiterentwickelt werden, um eine digitale und additive Herstellung eines Sensorsystems direkt auf dem Band zu ermöglichen.
Das Projekt umfasste daher die Realisierung einer digitalen direct-to-garment Integration eines Dehnungsmessstreifens (DMS) und dielektrischer Inselstruktur zur Elektronikintegration durch Inkjet- und Dispensing-Technologie auf dem CondElastX Band.Die Ergebnisse dieser Untersuchung bestätigen die Machbarkeit der angestrebten direkten Sensorintegration.

TBI 82: GreenNav2
Das Projekt befasste sich mit der Optimierung der Pfadplanung für ein Fahrzeug, das semiautonom in einem Weingarten Weinreben besprühen soll. Aufgrund des mechanischen Aufbaus des Fahrzeugs ist es dabei besonders wichtig, Kurvenfahrten zu minimieren, da diese den Boden des Weingartens beschädigen können. Im Zuge des Projekts wurde deshalb speziell darauf Rücksicht genommen und ein entsprechender Algorithmus zur Pfadplanung entwickelt. Durch die eingesetzte Digitalisierung ist es nun möglich, effizienter durch den Weinberg zu fahren.


TBI 83: NFC-Antennenentwicklung für ein smartes NFC-Device mit Aktor ohne eigene Energieversorgung
Ein von pewag entwickeltes NFC-Device sammelt und speichert Energie aus dem elektromagnetischen Feld eines NFC-Readers, um einen Aktor zu betreiben. Um die Benutzererfahrung zu verbessern war das Ziel eine Spule für das NFC-Device zu finden, welche die Energieübertragung für definierte Referenzsituationen maximiert, wobei der Position von NFC-Reader und NFC-Device zueinander variabel sein sollte. Dafür wurde der Kopplungsfaktor als Funktion der Spulengeometrie mathematisch beschrieben. Mit Hilfe einer Simulation konnten verschiedene optimale Spulen identifiziert werden.

TBI 84: Optimierung der Energieübertragung für ein NFC-Device mit Aktor
Ein von pewag entwickeltes NFC-Device sammelt und speichert Energie aus dem elektromagnetischen Feld eines NFC-Readers, um einen Aktor zu betreiben. Um die Benutzererfahrung zu verbessern war das Ziel das Potential für eine schnellere Aufladung des NFC-Devices zu untersuchen. Dafür wurde die Umsetzbarkeit von neuen schaltungstechnischen Konzepten analysiert und ein vielversprechendes Konzept zur effizienteren Energieübertragung evaluiert.

TBI 85: Sustainable Production Reporting and Analysis Framework
Die insideAx GmbH, spezialisiert auf den Vertrieb von ERP-Systemen, reagiert auf den steigenden Bedarf an Nachhaltigkeitsberichterstattung, der durch gesetzliche Änderungen und Kundenanforderungen getrieben wird. Ziel war die Entwicklung einer Lösung zur Erfassung und Analyse von Nachhaltigkeitsdaten. Im Projekt wurden relevante KPIs identifiziert und ein KI-gestützter Prototyp entwickelt, der die automatisierte Analyse von KPI-relevanten ERP-Daten und deren Übertragung in Tools zur Nachhaltigkeitsbewertung ermöglicht.
TBI 86: 3D-Werkstückerfassung für Kunsstoffschweißen – Machbarkeit
Edlmair produziert große Behälter und Sonderprodukte für unterschiedlichste Anwendungen in der Baubranche und chemischen Industrie in Kleinserien. Diese werden in der Regel aus Plattenware und Rohrstücken per Hand mittels Extrusionsschweißgerät teilweise auch überlappend zusammengeschweißt. Aufgrund der Mengen an Schweißnähten ist dies für die Mitarbeiter künftig nicht mehr ohne weitere Automatisierung machbar. Edlmair hat bereits 2024 in eine kollaborativen Roboter investiert und erste Prozesserfahrung mit dem System gesammelt. Aufgrund künftiger Kundenbedürfnisse und der benötigten Mengen muss der Robotereinsatz weiter ausgebaut werden. Hierzu soll das System mittels Kameratechnik noch rascher auf verschiedene Produktformate angepasst werden können.
Ziel des TBIs war es daher die Einsatzfähigkeit eines günstigen, auf dem Roboter installierbaren 3D-Teilerfassungssystems für das Erfassen und Kompensieren von Positionsfehlern auf großen Bauteilen zu untersuchen, um künftige Prozessausführung wesentlich zu beschleunigen und zu vereinfachen.
Im Rahmen dieses TBIs wurden zur Bewertung der Machbarkeit folgende Arbeiten durchgeführt:
-
Erstellung Labordemonstrator zur Vorbereitung der Grundfunktionen an einem Labortestteil
-
Aufbau eines 3D-Kamerasystems auf dem bestehenden Roboter
-
Prototypische Implementierung (Funktionsmuster) einer kombinierten 2D/3D-Lageerkennung von Schweißregionen auf einem Behälterbauteil mit KI-unterstützter Segmentierung (Teilmaterial schwarzer Kunststoff leicht glänzend)
-
Erprobung der Robustheit der Erkennung im Rahmen von Schweißversuchen zusammen mit den Experten von Edlmair
Ergebnisse / Highlights:
-
Erfolgreiche Test des prototypischen Erkennungssystems (Funktionsmuster) und des Lösungskonzepts anhand von Stirnplattenschweißungen für ein Kleinserien- / Fitterelement aus schwarz-glänzendem Kunststoff
-
Basisbewertung für die weiteren Automatisierungsschritte von Edlmair zur Ableitung des Aufgabenportfolios für die spätere Realisierung

TBI 87: 2D Stapelerfassung für Profilsteher
Das Produkt Profilleisten als Teil von Absturzsicherungen wurde bei Imotech in Eugendorf eine Pilotanlage zur automatischen Montage aufgebaut. Dieses Pilotprojekt wurde durch die Ergebnisse eines vorangegangenen TBIs ermöglicht. In dieser ersten Realisierung wurde die Notwendigkeit einer situationssicheren Erfassung der Stapelprofile auf der Rohpalette identifiziert. Die Stäbe werden dabei gepackt auf der Palette angeliefert und müssen einzeln in die Montage per Roboter eingebracht werden. Eine hier geplante reine „blinde“ Depalettierung von der Europalette ist aufgrund von wiederholend auftretenden Positionsabweichungen der Palette und des Stapels/der Teile auf der Palette nicht exakt genug machbar, sodass die Teile nochmals vor dem Einlegen ausgerichtet werden müssen. Aus diesem Grund soll die Lösungsansatz zur Erkennung und Korrektur der Lage im Palettenstapel mittels 2D-Kameras untersucht werden.
Besonderer Fokus liegt hier auf der einfachen Parametrierbarkeit der Systeme für die spätere Eigenintegration durch Imotech in die Pilotanlage.
Zur Klärung der Machbarkeit des Lösungsansatzes wurden folgenden Arbeiten durchgeführt:
-
Aufbau Demosystem für Funktionstests im Labor von Profactor mit 2 Kamerasystemen und Sauggreifer-Balken
-
Installation von LED-Flächenbeleuchtungen zur vollständigen Ausleuchtung der EURO-Palette
-
Evaluierung Testfahrten der Lagebilder und prototypische Herstellung einer Erkennungssoftware zur 2D-Erfassung mittels IFM 3D-Vision-Sensor / Sensopart Smart-Kamera V50 für die gesägten Profilleisten auf EURO-Palette
-
Identifikation der technischen Grenzen aller Systeme und Ableitung von Vorgaben für die Vereinzelung der Teile in einer späteren kosteneffizienten Zuführung
-
Erstellung von Videos zur Dokumentation
Ergebnisse
Aus der Evaluierung der Versuche ergaben sich folgende Erkenntnisse:
-
Die spiegelnde Oberfläche und die Produktcharakteristik benötigt für eine gleichmäßige Ausleuchtung sowie ein vertikales Nachführen der Beleuchtung bei reduzierter Stapel. Reflexionen sind aber aufgrund der variierenden Oberflächen (Glanzgrad) dabei nicht vollständig auszuschließen, haben signifikanten Einfluss auf die Stabilität der Erkennung.
-
Beide getesteten Kamerasysteme bieten zwar einfache Bedienoberflächen mit einfach parametrierbarem, erfordern aber eine sehr exakte Ablageung des Setups, um eine ausreichende Bildqualität zu erzeugen. Sie stoßen bei dieser Art von Produkten an in der Erkennung an ihre Grenzen, da sie sich an dicht liegenden Teilen keine genügend robuste Unterscheidung erlauben und keine ausreichende Erkennung der Bilder bereitstellen.
-
Für eine Produktivnutzung ab dieser Produktart sind die Erkennungsergebnisse der getesteten Kamerasysteme derzeit nicht ausreichend robust. Daher plant Imotech dies künftig mit einem Lasersystem zum optischen Antasten zu realisieren.

TBI 91: Digitale plasmonische Metaoberflächen durch die Kombination von Inkjetdruck und Nanoimprinting
Plasmonische Farben – ein Spezialfall von Metaoberflächen – entstehen durich die resonante Wechselwirkung zwischen Licht und metallischen Nanostrukturen. Die Farbe wird durhc die Größe der Nanostruktur und den Brechungsindex des umgebenden Mediums beeinflusst. Da das Ändern der Größe der Strukturen teure und langsame Nanofabrikationstechnologien mit sich ziehen würde, wurde untersucht, ob sich Inkjet Druck eignet, um Tinten mit unterschiedlichen Brechungsindices auf der Oberfläche aufzubringen, um die Farbe zu ändern. Mehrere Tinten wurden erfolgreich getestet und das Verhalten der Tinten auf den nanostrukturierten Oberflächen evaluiert und optimiert.

TBI 92: Digitale Prozesstechnologie für biochip-Funktionalisierung
Bioherent entwickelt photonische Biosensoren zur Detektion von Arzneimittelüberempfindlichkeiten. Diese Sensoren reagieren basierend auf der Menge eines bestimmten Immunglobulins. Um effizientere und realistischere Ergebnisse zu erzielen, kann eine Methode das selektive Drucken mit einer Biorekognitionsschicht direkt auf die Sensorbereiche sein, um irrelevante Daten zu entfernen and möglichst Sensitivität zu erhören. In einer Test-Before-Invest Studie hat PROFACTOR die gezielte Immobilisierung von Antikörpern mittels Inkjet-Druck auf definierten Bereichen des Chips untersucht, um diese Herausforderung zu adressieren. Neben dem lokalen Druck können signifikante Einsparungen bei Material und Zeit erzielt werden, was entscheidende Faktoren für eine effiziente industrielle Produktion darstellt.

TBI 94: Multimodal Human Machine Interaction
Untersucht wurde die menschzentrierte Gestaltung multimodaler Interaktion für den Dreh-Drückknopf von KEBA. Ziel war die prototypische Entwicklung eines Editors zur raschen Konfiguration von Interaktionsmodi, etwa haptischen Impulsen. Die Arbeiten umfassten Konzeptentwicklung, Design und Development eines Prototyps. Das Ergebnis ist ein Klickprototyp zur vereinfachten Testung multimodaler Szenarien, der die technische

TBI 95: Feasibility study on vibration-based condition monitoring for autonomous CNC machining
Bei der CNC-Fertigung werden Betriebsparameter von erfahrenem Personal überwacht, um Ausschuss zu vermeiden – unbeaufsichtigter Betrieb ist nicht möglich. Im Projekt wurden Methoden untersucht, Fehler, die durch nicht optimale Betriebsparameter und abgenutztes Werkzeug entstehen, automatisiert zu erkennen. Dazu wurden mit nachgerüsteter Sensorik Messungen bei unterschiedlichen Betriebszuständen durchgeführt, und Steuerungsdaten aus der Maschine wurden parallel dazu ausgelesen. Die Auswertung der Daten mit KI-Methoden zeigt vielversprechende Ergebnisse.
TBI 97: Augmented Reality und Künstliche Intelligenz für eine verbesserte Flugzeuginspektion
Der Flugzeuginspektionsprozess umfasst zahlreiche Inspektionsaufgaben an unterschiedlichen Bereichen des Flugzeugs und wird derzeit überwiegend manuell durchgeführt. Im EDIH-finanzierten Projekt A3R wurde daher ein menschenzentriertes Inspektionssystem mit drei Subkomponenten entwickelt und auf einem Augmented-Reality-Gerät erprobt. In einem Anwendungsfall zur Seriennummernerkennung wurden ein Objekterkennungsmodell (Ergebnis: 90 mAP, 30–50 ms) sowie ein hybrider optischen Zeichenerkennungansatz (OCR) (Ergebnis: 95 % Genauigkeit) entwickelt. Ein besonderes Highlight war die praxisnahe Umsetzung und Erprobung des Systems an einem realitätsnahen Ausschnitt einer Flugzeuginspektion.

TBI 100: Digitale Produktion in einem Rolle-zu-Rolle Mikro/Nanoprägeprozess mit Hilfe des Inkjet Drucks
Hueck Folien stellt großflächige mikrostrukturierte Oberflächen auf Folien her Der Einbau von Inkjet Druck soll die Flexibilität des Prozesses erhöhen, Material einsparen und individualisierte Produkte ermöglichen. Im Rahmen der Untersuchungen wurde der Inkjet Druck auf den Mikrostrukturen von Hueck evaluiert. Dabei wurde das Benetzungsverhalten und der Einfluss der Kapillarkräfte auf den strukturierten Oberflächen beleuchtet. Neben einer farbigen Tinte wurden 2 transparente Tinten mit unterschiedlichen Brechungsindices und eine reaktive Silbertinte getestet. Es konnte gezeigt werden, dass die erwarteten Effekte grundsätzlich auftreten, es jedoch Optimierungspotential hinsichtlich der Tintenauswahl, Benetzung und Deckkraft der Tinten gibt. Als Highlight konnte gezeigt werden, dass die zweilagige Kombination der transparenten Tinten, die optischen Effekte erfolgreich beim Überdrucken bewahren kann.
TBI 101: Fundermax
Bei der Synthese von Phenol-Formaldehyd-Harzen kam es zu Qualitätsschwankungen in der Produktion eines Herstellers von dekorativen Hochdruck-Schichtpressstoffplatten. Ziel war es, den Harzaufbereitungsprozess zu analysieren und durch sensorbasierte Messungen und Datenanalyse Prozesserkenntnisse zu erhalten. In einer Testumgebung wurden Versuche durchgeführt, Zustandsparameter wie Schallgeschwindigkeit und Temperatur erfasst und ausgewertet. Die Variation von Versuchsparametern zeigte klare Korrelationen zur Produktqualität.

TBI 102: Rapid-Prototyping eines Skin-on-Chip-Geräts für präklinische Produkttests
Digitale Herstellungsverfahren wie der 3D-Druck ermöglichen eine schnellere, präzisere und individuell anpassbare Production. Ziel ist es, einen digitalen Prozess zur Entwicklung und Herstellung von Organ-on-Chip-Geräten zu etablieren. Besonders hervorzuheben ist, dass 3D-gedruckte Abgunssformen erfolgreich für das Gießen und Aushärten von PDMS eingesetzt werden konnten. Die so enstandenen PDMS-Bauteile wurden plasmabehandelt und zu Demonstrationszwecken zusammengestzt.

TBI 104: Wissensmanagement in der Rohstoffevaluierung (WMRE)
Im Projekt wurde das Potenzial von KI-Modellen für das Wissensmanagement bei TIGER Coatings evaluiert, wo Rohstoffdaten unstrukturiert verteilt waren. Ein Prototyp basierend auf einer RAG-Pipeline wurde entwickelt, der über 5.000 Dokumente analysiert, um komplexe Anfragen zu beantworten. Das Ergebnis ist ein erfolgreicher Proof-of-Concept, der die Machbarkeit eines KI-Assistenten zur Effizienzsteigerung und zur fundierteren Entscheidungsfindung im Rohstoffmanagement eindrucksvoll belegt.

TBI 105: Intelligente Kalkulationsplatform für maßgeschneiderte Wärmebehandlungstechnik
RÜBIG Anlagentechnik entwickelt gemeinsam mit dem SCCH einen intelligenten Anlagenkonfigurator, der auf Basis spezifischer Materialeigenschaften automatisiert Vorschläge für die optimale Anlagenkonfiguration und passende Prozessführung ermöglicht. Herzstück des Projekts ist eine skalierbare Datenmanagementplattform mit einem einheitlichen Datenmodell, das Geometrien, Werkstoffdaten, Nitrierparameter, Anlagengrößen, Plasmaleistungen und weitere technische Eingaben strukturiert integriert. Ziel ist es, eine konsolidierte Datenbasis zu schaffen, um den Kommunikationsaufwand zu reduzieren, die Entscheidungsqualität zu erhöhen und langfristig KI-gestützte Mechanismen wie thermische Auslegungen, Nitriersimulationen oder Chargenfüllgradberechnungen zu realisieren. Ein erster Prototyp zeigt bereits automatisierte Vorschläge für Wärmebehandlungsaufträge

TBI 106: Predictive Polymer Melt Degradation
Spritzgusssimulation ist Stand der Technik, stößt jedoch bei dicken Wandstärken und hochtechnologischen Anwendungen (z.B. PVDF) auf Grenzen. Materialabbau und Verfärbungen durch Heißkanalsysteme sind schwer vorhersagbar, da geeignete Modelle fehlen. Ziel ist die Entwicklung eines PVDF-Degradationsmodells für Simulationen. Teilziele umfassen Analyse, Kalibrierung, Validierung und Implementierbarkeit. Rheologische und thermodynamische Messungen wurden durchgeführt, und die Materialeigenschaften mit einem Materialmodell gefittet.
TBI 107: Hybride Konfiguration und Datenvisualisierung für IOT Basierte Produktionsüberwachung
Der Bedarf an kooperativer Produktionsüberwachung und vereinfachtem IoT-Sensor-Setup bildete die Ausgangssituation. Ziel war der Machbarkeitsnachweis für hybride XR-Visualisierung mit UX-Optimierung. Das Ergebnis ist ein funktionsfähiger Prototyp, der 2D-Tischprojektion mit 3D-AR vereint und digitale Zwillinge von vier Druckguss-Inseln sowie präzise Stiftinteraktion mit haptischem Feedback bietet. Parallel entstanden App-Wireframes für vereinfachten Sensor-Onboarding. Die tangible Integration, synchronisierte Visualisierungen und das kooperative Monitoring sind zentrale Highlights. Der „Test Before Invest“-Ansatz validierte erfolgreich die technische Machbarkeit und den Mehrwert für künftige Leitstandslösungen.

TBI 108: Effizienzsteigerungen bei WIG & Plasma-Schweißinvertern
Schweißinverter sind für das Fügen metallischer Bauteile essenziell. Aufgrund des hohen Leistungsbedarfs ist die Energieeffizienz ein wichtiges Qualitätsmerkmal. Durchgeführte Messungen an einem aktuellen Schweißinverter haben mögliches Verbesserungspotential aufgezeigt. Dieses Auszuschöpfen ist aber aufgrund des Reifegrades der aktuellen Technologie, nur durch einen Umstieg auf moderne Wide-Bandgap-Halbleiter mit abgepasstem Schaltungsdesign und hochperformanter Regelung realistisch. Dieses Test before Invest wurde von AIT für die Firma SBI durchgeführt.

TBI 109: Roboterunterstütztes Finishing für Waschbecken
Das Ausfertigen von Waschtischen aus Mineralguss erfolgt nach wie vor durch manuelles Polieren der Oberflächen. Dieser Vorgang ist für den Mitarbeiter besonders bei großflächigen Produkten ermüdend. Im Rahmen dieses TBIs wurden die Machbarbarkeit einer roboterunterstützen
Ausfertigung untersucht. Hierzu wurde im Werk von Lottmann ein kollaboratives Robotersystem mit einem adaptieren Handwerkzeug als Funktionsmuster aufgebaut und 2 Tagen an einer Serienwaschtisch-Type die erzielbare Oberflächenqualität und die notwendige Programmerstellungsmethodik unter Einsatzbedingungen untersucht. Die nötigte Prozessqualität wurde bereits nach einem halben Tag erreicht werden. Es wurden anschließend 15 Mustertische in Serienqualität mit dem Roboter poliert und hierbei das reale Einsatzszenario auch mit den manuellen Zwischenschritten (Auftragen der Polierpaste, Prüfen der Qualität, Zwischenreinigung und Prüfung der Qualität) mit den Mitarbeitern durchgespielt. Hinsichtlich Programmerstellung und Variantenbildung wurde mit den Mitarbeitern eine Methodik für die Bearbeitungsreihenfolge und die spezifische Bearbeitungsparameter und Methoden für einzelne Beckenbereichen festgelegt. Mit diesen validen Ergebnissen können nun die weiteren Planungsschritte für eine Pilotinstallation konkret festgelegt werden.



TBI 110: Automatisches Kantenbrechen mit Roboter
Das Nacharbeiten von spritzgegossenen Kunststoff-Außenverkleidungen erfolgt
nach wie vor durch ein manuelles Entfernen von Gussgraten mit Handwerkzeugen
wie Schleifpapier und Abziehen mit Keramikklinge. Diese Arbeiten erfordert hohe
Konzentration und viel Feingefühl, da es sich hier teilweise um Sichtflächen für
eine spätere Lackierung handelt. Aufgrund der hohen Belastung ist der Prozess
sehr fordernd für den Handgelenksbereich, sodass ein Teil der Belegschaft für
diese Tätigkeit nicht mehr eingesetzt werden kann.
Im Rahmen dieses TBIs wurden zur Bewertung der Machbarkeit einer robotischen
Lösung folgende Aspekte untersucht/erprobt:
- Einsatz eines kollaborativen Robotersystems für sensitive Entgrataufgabe
- Kosteneffiziente Adaption von erprobten Handwerkzeugen für den
Robotereinsatz mit Hilfe von 3D-Druck – Komponenten - Machbarkeit einer optischen Bestimmung des Gratüberstands zum
selektiven Ausschleifen / Einebnen der Gussgrate - Erprobung der Handwerkzeug an über 20 Musterteilen zusammen mit
Expertinnen, um Aussagen zur Serienfähigkeit der Teilbearbeitungsschritte
zu machen.
Highlights hierbei waren die:
- einfache Automation und Erprobung mit adaptierten Handwerkzeugen
- rasch erreichte hohe erreichte Prozessqualität für die überwiegende Anzahl
der Bearbeitungsregionen - iterative Evaluierung unter Realbedingungen vor Ort mit Expertinnen zur
Bewertung der Prozessqualität

TBI 111: Automatisches Setzen von Abstandhalter in der Pulverbeschichtung
In der Beschichtungsanlage werden Profile auf eine Förderkette gehängt, mit Lackpulver bedeckt und anschließend in einen Ofen (t>250°C) gefahren. Durch die große Ofenhöhe von ca. 8m (für Profile mit einer Maximallänge von 7,4m) und die offene Einfahrt und Ausfahrt ergeben sich turbulente Luftströmungen, die zu einem Pendeln und Zusammenstoßen von Profilen führen können. Als Gegenmaßnahme werden Profile an der Unterkante manuell mit Klammern an einer Kette fixiert, damit diese nur mehr einen begrenzten Spielraum für Bewegungen haben. Der Abstand der Profile ist variabel, da diese je nach Profiltype mit unterschiedlichen Abständen an die Förderkette gehängt werden. Dies erfolgt daher durch einen Mitarbeiter auf einem Hubwagen je nach aktueller Profillänge.
- Dieser Vorgang soll künftig sowohl aus wirtschaftlichem Gründen aber vor allem aus Ergonomiegründen automatisiert werden. Im Rahmen dieses TBIs wurden zur Bewertung der Machbarkeit einer robotischen Lösung folgende Aspekte untersucht und Arbeiten durchgeführt:
- Aufbau Roboter-Teststand mit Werkzeugkopf und Haltevorrichtung+ Erkennungssensorik und Lineartransport bei Profactor
- Montage der beigestellten Förderkettenelementen zum Nachstellen der realen Aufhängesituation
- Entwurf und prototypische Herstellung / Funktionsmuster für ein adaptierten Abstandshaltersystem auf Basis der vorhanden Klemmen
- Erstellung Werkzeugentwurf für Robotergreifer + Sensorik + Vorrichtungen
- Auslegung Implementierung und Testen 2D-Kamerasystem zur Profillageerfassung über einen Spiegel
- Programmierung Robotersystem für Setzen / Abnehmen der Abstandshalter aus einer Ablage
- Durchführung von Anklemm/Abgreiftests mit den Musterprofilen
- Ableitung der groben Vorgaben für eine Anlagenrealisierung
Es konnte ein die Machbarkeit eines einfaches, automationsfähigen und nachrüstbares Abstandhalterkonzepts nachgewiesen werden. Hierzu wurden die bestehenden Klemmen mit je 2 Kollisionshalbringen ausgestattet die einfach an bestehende Klemmen nachgerüstet werden können und eine exakte Ablage und Wiedergreifen durch den Roboter erlauben. Das Greifen dieser KlemmPumper aus einem Ablagespeicher erfolgt hierzu an den Zangenende und nur ein Standard Parallelbackengreifer mit gekröpften Finger verwendet werden.
Mittels prototypischen 2D-Erkennungssystem konnte die situative Position der Anklemmpunkt errechnet und mit dem Roboter erfolgreich Anklemmversuche durchgeführt werden.
Aus den Ergebnissen der Testaufnahmen und Anklemmversuche konnten konkrete Vorgaben für die weiteren Einwicklungsschritte und weiterzuführende Untersuchungen in Bezug auf die nötigte Temperaturbeständigkeit des Material der Abstandshalter und der Teiletransports abgeleitet werden. Unter anderem ist eine Beruhigung mittels Schiene ist nur nach dem Pulverbeschichten und unter Nutzung des 20mm Bereichs am Profilende anwendbar.

TBI 114: Automatisierte Datenanalyse einer SYNCROMILL
Thöni nutzt SYNCROMILL-Maschinen, kämpft mit Qualitätsschwankungen und Prozessinstabilitäten. Ziel ist die Digitalisierung zur Prozess- und Effizienzverbesserung. Daten werden mittels Edge Box erfasst, mit KI analysiert und visualisiert. Ergebnisse sind Prozessoptimierung, Ressourceneinsparung, weniger Verschleiß, Personalqualifizierung, Standortstärkung.

TBI 115: Machbarkeitssimulation Taktzeiten Spaltanlage
Im Zuge der Analyse der Schalungsplattenproduktion bei Pfeifer Holz wurden Optimierungspotenziale identifiziert, insbesondere der Bedarf an einem durchgängigen Leitsystem. Zielsetzung war die Konzeption einer teilautomatisierten Anlage, deren Umsetzbarkeit mittels Simulation geprüft werden sollte. Zu diesem Zweck wurden Simulationsmodelle entwickelt, in ein 3D-Layout integriert und die Prozessabläufe entsprechend programmiert und optimiert. Die Simulationsergebnisse lieferten detaillierte Erkenntnisse über Materialflüsse, potenzielle Engpässe sowie die Vorteile eines implementierten Leitsystems. Diese dienen nun als Grundlage für Investitions- und Planungsentscheidungen. Sämtliche Projektziele, insbesondere die Reduzierung von Stillstandszeiten und die Steigerung des Automatisierungsgrades, wurden erfolgreich erreicht.

TBI 116: ChatTMS – Chatbot for Tunnel Monitoring Sensors
Geodata produziert Senosoren und Software zur Tunnelüberwachung, um kritische Entwicklungen frühzeitig zu erkennen, dabei erschweren große Datenmengen zeitnahe Analysen. Diese Machbarkeitsstudie untersuchte den Einsatz eines KI-Chatbots: Ein Langugage Model (LM) wurde ausgewählt und evaluiert. Direkte Dateninterpretation durch LMs zeigte sich fehleranfällig, während die Umwandlung von Benutzereingaben in Datenbankabfragen oder andere Prozesse mittels LMs vielversprechender erscheint.
TBI 123: Evaluation of a Prototype for Automated Structural Document Analysis for Regulatory Texts
Kontrol arbeitet an der automatisierten Verarbeitung von Gesetzen und Standards, die oft nicht für die direkte Verarbeitung durch Computer gedacht sind (z. B. Textoder PDF-Dokumente, manchmal HTML). Diese Methode verwendet eine Kombination aus regel-basierten Verarbeitungsschritten, ergänzt durch den Einsatz von KI. Um die qualitativ hochwertige Weiterentwicklung der Software zu unterstützen, soll der derzeit vorhandene Prototyp dieser Software evaluiert werden.
TBI 127: Improving Production Engineering Prosesses through Template-based Digital Twins
Aktuelle Lösungen zur Veraltungsschale (engl. AAS) erfordern die Erstellung von Verwaltungsschalen für einzelne Geräte, was zu einem enormen Aufwand bei der Erstellung und Verwaltung für realisitsche große Szenarien führt.
Hauptergebnis des Projektes ist das folgende Metamodell zur Definiton von Template-regeln für AASs. Eine Demonstration anhand repräsnetativer Beispiele zeigte, dass dieses Metamodell eine valide Basis zur effizienten Erstellung einer großen Anzahl von Verwaltungsschalen bietet.

TBI 130: Automatische optische Prüfung pulverbeschichteter Objekte
Das Projekt untersucht die Automatisierung der Defekterkennung bei Produktionsteilen, um manuelle Inspektionen durch KI zu ersetzen.
Ziel: Effizienzsteigerung, digitale Nachverfolgbarkeit, Echtzeitanalysen. Experimente mit Deep Learning (z. B. Detectron2) und klassischer Bildverarbeitung zeigten 97,5 % Genauigkeit und 16 Bilder/Sek. als Highlights.
Limitation: Fehlende Datensätze.
Fazit: Großes Potenzial, weitere Daten nötig.

TBI 131: Entwicklung eines universell einsetzbaren IIoT-Sensors
In vielen Produktionsumgebungen sind ältere Maschinen im Einsatz, die keine modernen digitalen Schnittstellen besitzen. Dadurch fehlen Echtzeit-Daten zur Leistung und Effizienz, was es Betreiben erschwert, schnell auf Veränderungen zu reagieren, präventive Wartungen durchzuführen und Kosten sowie Ausfallzeiten zu minimieren. Ziel dieses Projekts war die Entwicklung eines universell einsetzbaren Sensorknotens, der unabhängig von Alter, Typ oder Hersteller unkompliziert an jede Maschine angebracht werden kann und die benötigten Echtzeit-Daten zur Verfügung stellt.
Im Rahmen dieses Projekts wurde von LCM die Hardware des Sensorknotens, genannt ActivityNode, entwickelt und mehrere Prototypen gefertigt. Anschließend wurde der ActivityNode in Betrieb genommen und Firmware-Komponenten zur Ansteuerung der einzelnen Sensoren implementiert. Der Fokus lag dabei auf einer energieeffizienten Erfassung der Sensordaten. Sowohl die internen Sensoren als auch externe Sensoren, die über ADC oder digitale Schnittstellen an den ActivityNode angebunden sind, wurden erfolgreich getestet. Zudem wurde der Energieverbrauch des Systems optimiert, um eine lange Laufzeit zu gewährleisten.

TBI 132: Portierung der AI-Methoden von Cloud-
Servern zu Edge Devices
Pataky Software nutzt ein Sensorsystem zur Überwachung von Werkzeugen und sendet die Sensordaten über ein EdgeGateway an eine übergeordnete Instanz, wo komplexe KI-Methoden für Analysen verwendet werden. Das Projekt setzte sich das Ziel, KI-Algorithmen so zu optimieren, dass sie auf den begrenzten Ressourcen von Edge-Geräten ausgeführt werden können. Dazu wurden mehrere Algorithmen erfolgreich auf einen Hailo8 Prozessor portiert und deren Qualität und Echtzeitfähigkeit überprüft. Die Laufzeitanalyse ergab, dass auch komplexere Algorithmen übertragbar sind.

TBI 133: Digitalisierung von Schutzlackauftrag
Im Rahmen einer Machbarkeitsstudie wurde die Eignung von Tinten mit lackähnlichen Eigenschaften für den digitalen Inkjet-Druck untersucht. Dabei erfolgte zunächst eine rheologische Charakterisierung der Tintensysteme, gefolgt von einer Bewertung der Verdruckbarkeit mithilfe des Chromojet Tabletop-Druckers. Durch die Anpassung eines temperierbaren Druckkopfmoduls konnte die Verarbeitung von Tinten mit Viskositäten von bis zu 600 mPa·s bei Raumtemperatur erfolgreich realisiert werden.

TBI 134: Automatisierung von Security Tests für Engineering Tools
Die Automatisierungs- Lösungen von Neuron GmbH sind komplexe Softwarelösungen. Diese bieten das Application-Engineering in allen relevanten IEC61131-3 Standard-Sprachen (FBD, LD, SFC, ST), aber auch die Entwicklung in generellen Hochsprachen wie C/C++. Diese Funktionen und Integrationen sind sowohl Grund des Erfolgs der Produkte, aber auch eine Herausforderung für das Testmanagement. Der Einsatz von Standard-Security Produkten für das Security Testen (DAST) sind nicht direkt möglich und mussten daher in mehreren Workshops maßgeschneidert werden. Durch dieses Forschungsprojekt wurde der Grundstein und das Verständnis für DAST für die Produkte gelegt.

TBI 135: Open Source Cybersecurity Anomalieerkennung in der Wertschöpfungskette
BA Research und Spusu haben gemeinsam untersucht, inwieweit Open-Source-Lösungen bestehende Technologien im Bereich der Sicherheitsoperationen ersetzen oder erweitern können. Ein zentrales Augenmerk lag auf der Anomalieerkennung, um potenzielle Angriffe und Störungen frühzeitig zu erkennen.
Im Rahmen des Projekts wurde eine skalierbare und ausfallsichere Testumgebung geschaffen, die wesentliche SOC-Module auf Open-Source-Basis implementiert.
Ein Teil der ISP-Infrastruktur wurde zur Evaluierung in die Umgebung integriert.

TBI 136: Kombinatorische Methoden für Planspiele in der produzierenden Industrie
Die Durchführung von Planspielen ist ein fester Bestandteil der Krisenvorbereitung sowie der Resilienzevaluierung von produzierenden Unternehmen. Doch welche und wie viele Krisenszenarien sollten betrachtet werden?
Infraprotect ist auf die Erstellung und Durchführung von Krisenübungen spezialisiert und hat zusammen mit Forschern der MATRIS Forschungsgruppe bei SBA Research die Anwendbarkeit von kombinatorischen Methoden zur automatisierten Szenariogenerierung für Planspiele in der produzierenden Industrie untersucht. Für ein fiktives produzierendes Unternehmen aus der Metallindustrie in Österreich wurden verschiedene Krisenszenarien zur Verwendung in Planspielen mittels kombinatorischer Methoden automatisiert erzeugt. Die im Rahmen dieses TBI angewendeten kombinatorischen Methoden ermöglichen nicht nur eine optimierte und automatisierte Krisenszenariogenerierung, sondern bieten auch Möglichkeiten Diversität in Mengen von Krisenszenarien quantitativ zu fassen. Insbesondere bieten derartig erzeugte Szenarienmengen garantierte Abdeckung sequentieller Anordnungen einer vorgegebenen Länge innerhalb des ganzen Szenarioraumes bei minimierter Kardinalität und können somit zu einer effizienten Resilienzquantifizierung beitragen.

TBI 137: LLM-Based Product Model Version
Es wurde für die LieberLieber Software GmbH, dem Anbieter einer Modellversionierungslösung, eine LLM-gestützte Erweiterung für Erkennung und Umgang mit konfliktären Modelländerungen getestet. Die derzeitige Produklösung untersützd ausschlißlich die Erkennung syntaktitscher Konflikte. Mit einer Proof-of-Concept, wurde das Potential von LLMs bezüglich der Erkennung und Auflösung von syntaktischern als auch semantischen Konflikten evaluiert. Die Implementierung baut auf Analysetools für Modelländerungen und GPT-4o auf.
TBI 138: Konzeptstudie zu Auswirkungen von Fertigungstoleranzen bei Ventilen auf die Regelung des Gesamtsystem
Andreas Lupold Hydrotechnik GmbH is developing a digital hydraulic controller unit for variable hydraulic pumps. This totally new controller approach gives the customer more flexibility and functionality for his applications. As a part of this project, effects of production tolerances in series production are studied together with the Linz Center of Mechatronics GmbH (LCM). Simulations and measurements were used to show the influence on the control performance. The resulting information is used for latter corrective actions applied to the controller

TBI 140: Robotischer Assistent für die Platinenprüfung
Aktuell werden 1000Stk. Elektronikplatinen pro Woche in einem Nadelprüfadapter auf ihre elektrische Funktion geprüft. Dies geschieht durch einen Mitarbeiter, der die Platine in den Nadeladapter einlegt, die elektrische Prüfung startet und nach Durchlauf der Prüfung die Platine in ein Gut/Schlecht-Lager entnimmt. Diese einseitige manuelle Tätigkeit soll künftig automatisiert werden.
Im Rahmen dieses TBIs wurden zur Bewertung der Machbarkeit einer robotischen Lösung die kritischen Aspekte für die Automation anhand folgender Arbeiten durchgeführt:
-
Anforderungsdetailierung und Grobentwurf des Anlagenkonzepts für eine verlegbare Robotereinheit
-
Als Werkzeug wurde ein pneumatisches Spezial-Greifsystem erstellt und in mehreren Iterationsschritten erprobt.
-
Aufbau Funktionsmuster mit Laborroboter UR20, Dummy-Vorrichtung, und Spezialgreifer
-
Durchführung von Greif- und Ablegeversuchen
Ergebnisse
-
Eine kameragestützte Lagererfassung in den Boxen ist aufgrund der Überdeckung der Blenden nicht robust genug. Daher ist hier eine Abrasterung mit einem Lasersystem zu empfehlen.
-
Das entwickelte Greifsystem konnte seine Eignung für das Handling der Platinen bestätigen. Hier sind allerdings noch weiterführende Optimierungen notwendig.
-
Die Machbarkeit des initial definierten Anlagenkonzepts mit schräg positionierten Boxen und einer kraftgeregelten Be-/Entladung des Prüfgeräts konnte somit nachgewiesen werden.

TBI 141: RHP-Technology GmbH
RHP-Technology ist ein weltweit aktives Unternehmen für innovative Pulvertechnologien und intelligente Materialentwicklungen. In Kunden- als auch Forschungsprojekten engagiert sich RHP für Innovationen im Bereich neuer Werkstoffe, Verfahrenstechnologien und maßgeschneiderten Produktlösungen.
Die Entwicklung neuer Legierungen ist ein komplexer Prozess, der sehr viel Domänenexpertise und Erfahrung benötigt, um die gewünschten Materialeigenschaften zu erzielen. Neuentwicklungen von Legierungen erfolgen derzeit mittels Versuchsreihen, um Komponenten und Fertigungsparameter zu bestimmen, welche zu einem Produkt mit notwendiger Qualität führen.
Ziel war es, anhand ausgewählter Anwendungsfälle einen Machbarkeitsnachweis für die Entwicklung KI-gestützter Verfahren durchzuführen, um das Potential u.a. hinsichtlich
- Verbesserung der Materialeigenschaften
- Reduktion von Ausschuss
- Beschleunigung von Entwicklungszyklen
- Nachhaltigkeit aufzuzeigen.
Es wurde ein prototypisches Vorhersagemodell für die erwartete Dichte des Endprodukts entwickelt. Ausgangspunkt sind Merkmale, welche auf den physikalischen Eigenschaften der verwendeten Pulvermischungen basieren. Zusätzlich wurde ein Alternativmodell entwickelt, das eingesetzt werden kann, wenn die physikalischen Eigenschaften der Ausgangsprodukte unvollständig vorliegen.
Die erzielten Genauigkeiten bestätigen das grundsätzliche Potential und die voraussichtliche Machbarkeit des Ansatzes zur Erreichung der definierten Ziele.
TBI 142: AI-Enhanced Quoting Automation
RHP-Technology ist ein weltweit aktives Unternehmen für innovative Pulvertechnologien und intelligente Materialentwicklungen. In Kunden- als auch Forschungsprojekten engagiert sich RHP für Innovationen im Bereich neuer Werkstoffe, Verfahrenstechnologien und maßgeschneiderten Produktlösungen.
Die Angebotserstellung bei RHP für komplexe Bauteile aus Sonderwerkstoffen erfolgt derzeit manuell durch Experten mit tiefem Prozess- und Materialverständnis. Dieser Ansatz ist zeitaufwändig, fehleranfällig und abhängig von verfügbarer Expertise. Angesichts steigender Nachfrage und Wettbewerbsdruck ist eine schnelle, präzise und kosteneffiziente Angebotslegung entscheidend. Daher soll der Prozess automatisiert werden, um Effizienz zu steigern, Fehler zu reduzieren und die Reaktionszeit zu verkürzen.
Erstes Ziel war die Bewertung der Datenverfügbarkeit und -qualität für die Entwicklung einer KI-gestützten Angebotslegung. Basierend darauf wurde ein Machbarkeitsnachweis für KI-gestützte automatisierte Angebotslegung für ausgewählte weniger komplexe Teile erbracht.
Ergebnis ist ein Prototyp einer automatisierten Preisermittlung für kundenspezifische Fertigungsanfragen. Statt manueller Expertenschätzung nutzt es historische Kosten- und Margendaten zur Vorhersage von Preisspannen. Ein Modell klassifiziert Angebote als „einfach“ oder „komplex“ und leitet komplexe Fälle an Experten weiter. Eine Kosten-Engine berechnet Preisfaktoren und Preisspannen unter Berücksichtigung von Unsicherheiten und Mindestmargen.

TBI 143: DRIVE_THRU
Das Projekt zielte darauf ab, die Datenkonsistenz in der TGA-Planung zu verbessern, Lebenszyklusanalysen (LCA) zu integrieren und Prinzipien der Kreislaufwirtschaft durch BIM und offene Standards zu fördern. Umweltauswirkungen wurden analysiert, Parameter in einer Revit-Familie integriert und ein Prototyp eines Workflows entwickelt. Die Ergebnisse ermöglichen fundierte Entscheidungen und Nachhaltigkeit in Workflows. Das Projekt zeigt, wie datenbasierte Ansätze Bauplanung in Richtung grüne und smarte Gebäude transformieren können.
TBI 145: Testing of optical inspection method for
the characterization of used solar modules for
the purpose of reuse/repair/recycling
Die kostengünstige Inspektion von gebrauchten-PV-Modulen für eine mögliche Wiederverwendung wird zukünftig wegen der erwarteten Rücklaufmenden wichtig sein. Das Startup 2ndCycle entwickelt deshalb für diesen Task eine vollautomatische Industrie 4.0-Inspektionsanlage. Das Ziel des Projekts war es 2ndCycle bei der Auslegung einer für die Verwendung von AI optimierten optischen Inspektionsstation zu unterstützen. Dazu wurden verschiedene Beleuchtungssysteme, Kameras und Objektive unter realen Umgebungsbedingungen getestet und miteinander verglichen. Es wurden unterschiedliche, für den jeweiligen Inspektionstask optimierte, Systeme verbaut.

TBI 146: Immersive Tunnel Geology
Tiefen und räumliche Verhältnisse werden auf 2D-Bildschirmen schlechter erfasst als in VR. In VR werden daher Schäden am Tunnel besser erkannt, was effizientere Einsatzplanung zur Folge hat. Ziel dieses Projektes war es Tunnelbegehungen in VR zu ermöglichen, sowie geologische Untersuchungen vorzunehmen. Dafür wurde ein Prototyp entwickelt, in welchem man sich frei im Tunnel bewegen kann. Eine abstrakte Darstellung eines Geologenkompasses ermöglicht es für Geologen relevante Werte auszulesen.

TBI 148: Messprotokollstandardisierung für die effiziente und robuste industrielle Datenanalyse
Im Rahmen dieses Projekts wurde ein Verfahren entwickelt, um die Qualitätsprüfung im Unternehmen Ernst Wittner GmbH zu optimieren und die Erzeugung von standardisierten Prüfberichten zu automatisieren.
Hierfür müssen technische Zeichnungen automatisiert eingelesen und proprietäre Messformate harmonisiert werden können. Durch den kombinierten Einsatz klassischer regelbasierte Software und KI-gestützter Dokumentenanalyse wurde eine Anwendung inkl. UI entwickelt, die nun aktiv im täglichen Qualitätskontrollprozess der Ernst Wittner GmbH eingesetzt werden kann.

TBI 149: Montageassistenz im Ofenbau
Bei der Vormontage von Ofenteilen sind vor allem der Auftrag / das Einbringen von Dichtmaterial bei der Montage von Ofentüren wesentliche derzeit noch ausschließlich manuelle Prozessschritte. Die Montage erfolgt derzeit an 4 Arbeitsplätzen, wobei die Mitarbeiter die Türen direkt aus dem Transportgebinde entnehmen, dieses Ausrüsten und dann wieder in das Transportgebinde ablegen.
Hier soll künftig ein kollaboratives Robotersystem bei Teilen der Montageschritte unterstützen. Mit einer Teilautomatisierung werden folgende Ziele verfolgt:
- Steigerung der Produkt und Prozessqualität
- Entlastung der Mitarbeiter von monotonen Tätigkeiten
- und damit Erhöhung der Arbeitsplatzattraktivität
- Reduktion des Materialverbrauchs durch gleichmäßigere Prozesse
- Nachverfolgbarkeit von Montageteilschritten
Voraussetzung hierfür sind eine einfache Bedienbarkeit des Systems beim Umrüsten auf neue Teilevarianten für kurze Rüstzeiten und unter Verzicht auf spezifischer Aufspannsysteme.
Zur Abklärung der Machbarkeit wurden im in diesem TBI folgende Arbeiten durchgeführt:
- Entwurf /Aufbau Demo-Robotersystem mit Kamera, Silikonpistole und 1D-Lasersystem
- Hierbei erfolgt die Aufspannung der Teile durch wahlloses Auflegen im Sichtbereich der Kamera
- Für die Erfassung der Teilelage und Auftragserzeugung wurde eine prototypische Verarbeitungskette implementiert und die notwendigen Grundfunktion für die Eingabe eines Auftrags anhand der Bilddaten der Aufspannung hergestellt
- Durchführung von Erkennung und Auftragstests bei Profactor für 3 repräsentative Musterteile (Ofentüren)
- Aufbau Demosystem bei RIKA nach Micheldorf und Durchführung von Auftragsversuche vor Ort
- Ableitung der groben Vorgaben für Realisierung auf Basis der Erkenntnisse der VorOrt -Tests
Aus derzeitiger Sicht ist das geplante Technologiepakete für das Silikonauftragen mit automatisierte Handkartuschenpistole, günstigen 3D Kamerasystem zur Lageerfassung und 1D-Lasersystem zur Feinpositionskorrektur der minimal nötige technische Ausrüstungsumfang. Es konnte damit eine ausreichend robuste Erfassung der Teilelage ist auf den Bauteilvarianten erreichbar und eine hinreichend prozesssichere, kraftgeregelte Ausführung des Silikonauftrags auf den dreidimensionalen Teilen konnte nachgewiesen werden

TBI 152: Low-Code for Programmable Logic Control
Das Projekt zielte auf die Entwicklung einer Low-Code Development Platform (LCDP) ab, um Domänenexpert_innen die Erstellung von Automatisierungssystemen ohne Programmierkenntnisse – als Brücke zwischen kundenspezifischen Anforderungen und dem Bedarf an Automatisierung – zu ermöglichen. Ein lauffähiger web-basierter Prototyp wurde entwickelt, der interne Demonstrationen ermöglicht, bei Geschäftspartnern Interesse wecken und als Basis für weitere Entwicklungsarbeiten dienen soll.
TBI 155: AIOptimizer@Metal
Im TBI-Projekt AIOptimizer@Metal wurde gemeinsam mit MARK Metallwarenfabrik GmbH ein neuartiger, KI-basierter Ansatz zur sensorübergreifenden Anomalieerkennung in komplexen, mehrstufigen Umformprozessen als Proof-of-Concept realisiert und validiert. Ziel war die Entwicklung eines intelligenten Überwachungsmoduls, das Fehler dort erkennt, wo sie entstehen – direkt im Takt der Fertigung. Inspiriert von menschlichen Sinnen verfolgt das System das Prinzip: taktil fühlen, akustisch hören – maschinennah, erklärbar und adaptiv.
Die zentrale Innovation liegt im Einsatz eines genetischen Algorithmus, der aus einem hochdimensionalen Feature-Raum (ca. 100 Merkmale pro Sensor) automatisch optimale Merkmalskombinationen auswählt und in ML-Modelle wie One-Class SVM, k-NN und logistische Regression integriert. In der besten Testkonfiguration konnten 11 von 16 real erzeugten Fehlerteilen (z. B. feine Risse, unvollständige Glühung) sicher erkannt werden – ohne Fehlklassifikationen guter Teile.
Ein besonderes Highlight ist die sensorübergreifende Fusion von Druck-, Vibrations- und Akustikdaten zu einem Ensemble-Modell für den industriellen Tiefziehprozess. Durch den Einsatz von SHAP-Werten werden die Vorhersagen interpretierbar und die Entscheidungslogik nachvollziehbar – ein zentraler Schritt in Richtung vertrauenswürdiger industrieller KI.
Der entwickelte Demonstrator ist ein Meilenstein auf dem Weg zu resilienten, sich selbst konfigurierenden Überwachungssystemen in der metallverarbeitenden Industrie. Adaptive KI, die direkt aus realen Prozesssignalen lernt, eröffnet neue Potenziale für qualitätsgesicherte, energieeffiziente und zukunftsorientierte Produktionsprozesse.

TBI 156: AI-gestützte dynamische Steuerung zur Optimierung von Hochstromsignalen für den elektroplastischen Effekt in der Metallverarbeitung
Im Test before Invest (TBI) dynamicAIcontrolEPE wurde ein neuartiges, KI-gestütztes Bildanalysesystem evaluiert, das eine adaptive Closed-Loop-Regelung des Umformprozesses unter Ausnutzung des elektroplastischen Effekts (EPE) ermöglicht.
In Kooperation mit dem LKR realisierte LARsys ein kamerabasiertes Framework, das in Echtzeit die laterale Breitenänderung – und damit indirekt die plastische Ausdünnung – von Zugproben während mechanischer Belastungsversuche detektiert. Diese geometrische Veränderung dient als sensorische Rückkopplung zur adaptiven Regelung der Stromimpulse, welche entscheidend zur gezielten Auslösung und Steuerung des EPE beitragen.
Das System kombiniert klassische Verfahren der Bildverarbeitung mit einer modularen Softwarearchitektur bestehend aus einem Live-Modul zur kontinuierlichen Datenaufnahme und Visualisierung, einem Kalibrierungsmodul zur Justierung der Kantenerkennung und ROI-Definition, sowie einem Entzerrungsmodul auf Basis der Kamerakalibrierung zur Korrektur optischer Verzerrungen.
Eine interaktive GUI (basierend auf Matplotlib) bietet Visualisierung von Verdünnungsdaten, Linienanpassung, Debug-Informationen und ermöglicht die Konfiguration persistenter Settings.
Ein zentrales Ergebnis des TBIs ist die funktionale Kopplung der erfassten Verdünnungswerte an die Steuerung einer Hochstromanlage (bis zu 40 kA DC) mit PWM-modulierten Stromprofilen. Dieses Mapping erlaubt eine dynamische Ansteuerung des elektrischen Feldes in Abhängigkeit der plastischen Dehnung der Probe. Die Gesamtpipeline – von der Bildaufnahme über die ML-gestützte Interpretation bis hin zur aktiven Stromregelung – konnte mit einer Systemlatenz von unter 30 ms realisiert werden ein Meilenstein für die Echtzeitfähigkeit von Edge-KI Systeme am LKR.
Die Lösung wurde erfolgreich an der semi-industriellen Tiefziehpresse des LKR getestet und zeigt das hohe Potenzial von KI-gestützten, sensorgestützten Echtzeitregelungen in der metallverarbeitenden Industrie. Damit bildet dynamicAIcontrolEPE einen Meilenstein am Weg zur Umsetzung intelligenter, prozessintegrierter Steuerungssysteme auf Edge-Plattformen im industriellen Kontext

TBI 157: AI-gestütztes Framework zur zeitsynchronen Datenerfassung und Fehlervermeidung in der Metallverarbeitung
LARsys ist ein erfahrener Entwicklungspartner für maßgeschneiderte Elektronik- und Automatisierungslösungen in industriellen Anwendungen. Im Rahmen des TBI-Projekts SynchroAI@Metal wurde gemeinsam mit dem Leichtmetallkompetenzzentrum Ranshofen (LKR) ein Framework entwickelt, das eine zeitsynchrone Erfassung und Korrelation von Mikrofon-, Schwingungs- und Prozessdaten im laufenden Metallumformprozess ermöglicht. Ziel war es, durch präzise Datensynchronisation der akustischen Emissionen Fehler frühzeitig zu erkennen, die Prozessstabilität zu erhöhen und gleichzeitig Energieeffizienz und Datenqualität zu steigern.
Das System wurde erfolgreich an der semi-industriellen Tiefzieh-Presse des LKR getestet und on edge – also direkt an der Maschinenebene – in die bestehende Steuerung und den LKR-Datenraum integriert.
Highlight: Die daraus entstehende Datengrundlage ermöglicht KI-gestützte Anwendungen wie Anomalie-Detektion, Zustandsüberwachung und vorausschauende Wartung. Das Tool eignet sich besonders für die Planung akustischer Experimente, Kalibrierung von Mikrofonarrays und die systematische Dokumentation von Messaufbauten in der Schallmesstechnik und akustischen Forschung.
Dieses Framework dient LARsys als Schlüsseltechnologie für zeitsynchrone Sensorik in modernen Automatisierungsanlagen und autonomen Fahrzeugen. Insbesondere in der Intralogistik eröffnet es neue Anwendungsfelder: Von der akustischen Qualitätserkennung bis hin zu autonomen Inline-Steuerfunktionen in fahrerlosen Transportsystemen – überall dort, wo Echtzeit, Präzision und maschinennahe KI-Intelligenz gefragt sind.
LARsys baut damit seine technologische Führungsposition im Bereich sensorgestützter Edge-Lösungen und industrieller KI gezielt weiter aus.

TBI 158: Advanced Language Learning for Engineering Excellence
ALPEX ist ein kompetenter Engineering- und Fertigungspartner für Komplettlösungen in den Bereichen Werkzeug- und Vorrichtungsbau. Im TBI ALLEX (Advanced Language Learning for Engineering Excellence) wurde zusammen mit dem Leichtmetallkompetenzzentrum Ranshofen (LKR) ein Prototyp entwickelt, der durch Verwendung von Large Language Models (LLM) und Retrieval Augmented Generation (RAG) alle unternehmensweit verfügbaren Dokumente zu technischen Abläufen, Qualitätsrichtlinien und anderen produktionsrelevanten Themen benutzerfreundlich zugänglich und nutzbar macht. Durch diesen niederschwelligen Informationszugriff zielt ALLEX darauf ab, Transparenz und Effizienz in der Produktion zu steigern und das im Betrieb vorhandene Wissen nachhaltig zu nutzen. Der erfolgreich getestete Prototyp besteht aus Open-Source-Komponenten und ist als vollständig lokal betreibbares System für dokumentenbasierte Fragebeantwortung ohne Cloud Provider aufgebaut. So bleibt der Zugriff auf den gesamten Quellcode im Unternehmen und gewährt maximale Datensicherheit sowie volle Kontrolle und Anpassbarkeit der Software durch ALPEX.

TBI 159: WorkflowOptimizer
Im Projekt „WorkflowOptimizer“ wurde untersucht, wie die Produktionsplanung durch intelligente Entscheidungsassistenz verbessert werden kann. Ausgangspunkt war die hohe Dynamik im Tagesgeschäft und die damit verbundenen Herausforderungen bei kurzfristigen Umplanungen. Analysiert wurden bestehende digitale Daten, ergänzt durch Expertenwissen und temporäre Videoaufnahmen aus der Produktion. Erste Ansätze zeigen, dass KI-basierte Methoden künftig helfen können, Muster zu erkennen, Engpässe vorherzusagen und Umplanungen effizienter zu gestalten.

TBI 161: Assistenzsystem für Ganganalyse
PROFACTOR hatte im Vorfeld in Zusammenarbeit mit der Klinik einen Forschungsprototyp entwickelt, welcher basierend auf einfacher 2D Kameratechnik und innovativer KI-basierter Auswertung der menschlichen Haltung u.a. die zurückgelegten Schritte mit Schrittweite automatisiert abschätzen kann.
Das KI-basierte Assistenzsystem zur Ganganalyse mit 2D-Kameratechnik wurde im Klinik-und Laborumfeld getestet. Ziel war der Vergleich einerseits gegenüber manuellen Analysen und andererseits gegenüber High-End-Positionserfassungssystemen.
136 klinische Aufnahmen standen zur Verfügung. Darüber hinuas wurden 234 Videos mit OptiTrack-Positionsdaten für die Schrittlängenauswertung erstellt. Als Ergebnis konnte eine Genauigkeit des Assistenzsystems von 7,41 ± 15,6 Schritten beim 6 Minuten Gehtest und 0,0091 ± 0,063 m bei der Einzelschrittauswertung ermittelt werden.
Somit ist die Validierung des Forschungsprototypen sehr positiv ausgefallen. Das neue, wesentlich kostengünstigere und flexibler einsetzbare Assistenzsystem zur videobasierten Ganganalyse mit automatisierter Bewertung unterstützt sowohl Therapeut als auch Arzt und liefert durchgängige Dokumentation im Therapieverlauf mit ansprechender Genauigkeit und Qualität.



TBI 163: Projektionsassistenz Korpus
Im Rahmen einer praxisorientierten Machbarkeitsanalyse wurden erfolgreiche Tests zur KI-gestützten Lagererkennung und projektionstechnischen Assistenz durchgeführt. Mithilfe einer mobilen Datenerfassungseinheit konnten Mitarbeitende eigenständig relevante Bilddaten aufnehmen, um die KI für reale Produktionsbedingungen zu evaluieren. Ergänzende Projektionstests unter realen Lichtverhältnissen bestätigten die Sichtbarkeit und Praktikabilität des Systems. Zudem wurden konkrete Anforderungen an die REST-API-Schnittstellen definiert, um eine nahtlose Integration in bestehende Prozesse sicherzustellen. Die gewonnenen Erkenntnisse schaffen eine fundierte Entscheidungsgrundlage für die weitere Umsetzung.



TBI 164: Machbarkeit Automatisches Absorberlöten
Die Herstellung der Absorberharfen aus Kupfer: Die zugeschnittenen geraden Rohrstücke werden mit den stirnseitigen Verteilern zusammengesteckt und dann per Hand mittels Handbrenner hartverlötet.
Je nach Absorber-Format sind typischerweise bis zu 72 Lötungen notwendig. Dieser Lötvorgang ist aufgrund des Aufheizvorgangs und der korrekten Lotplatzierung sehr zeitintensiv und für die ausführenden Mitarbeiter monoton und ermüdend, da sowohl von oben als auch von unten gelötet werden muss. Aufgrund des sich abzeichnenden steigenden Bedarfs an leistungsstarken Solarthermie-Kollektoren für die Prozesswärme soll dieser Prozessschritt künftig bei Gasokol teilautomatisiert werden. Dabei soll auch eine Verlötung von trapezförmigen und dreieckigen Absorberharfen möglich werden.
Ziel des TBI war die Abklärung der Machbarkeit einer teilautomatischen Verlötung der Absorberharfen mittels Induktivlöten in verschiedenen Formaten mittels Robotersystem. Dazu wurden folgende Arbeiten zur Untersuchung der Machbarkeit durchgeführt:
-
Untersuchung der Zugänglichkeit des Lötbereich(s) mit einem Induktor-Dummy am Roboter
-
Festlegen eines Sensorsetups zur Format- und Lagererfassung des Testabsorbers (Musterteil)
-
Aufbau Funktionsmuster mit Roboter, Induktor-Dummy, 2D/3D-Sensorsystem und beigestelltem Musterteil
-
Durchführung von 2D/3D-Probeaufnahme zur Aufspannungserfassung mit eingebrachten Lotring-Dummys
-
Implementierung Positionserfassung und Lötringdetektion auf Basis von Trainingsdaten der Lötstellen aus 2D/3D-Daten
-
Programmierung des Robotersystems für eine Dummy-Lötfahrt
-
Testweises Erzeugen und Abfahren von Roboterpfaden für den Lötprozess
-
Ableiten von Vorgaben für die Teil-Automation des Gesamtprozesses im Hinblick auf die Entlastung der Mitarbeiter, Bedienung u. Anwendbarkeit auf verschiedene Formate sowie der dazu notwendigen Ausrüstung und der erreichbaren Prozesszeiten
Ergebnisse:
-
Der für die Robotertests entworfene hakenförmige Induktor-Dummy kann die Lötbereiche ausreichend abfahren. Die Auslegung basiert auf ersten Erkenntnissen von Lötversuchen bei Gasokol. Für den Serienansatz ist später ein breiterer Induktor vorgesehen. Dazu können die Absorberbleche so gekürzt werden, dass der Spalt zum Sammlerrohr mehr als 20 mm groß sein kann.
-
Mit der eingesetzten KI-unterstützten 2D/3D-Erfassung der Lötzonen und der Anwesenheit der Lötringe kann der Roboter bei variabel platzierter Absorberharfe exakt genug positioniert werden.

TBI 165: Smart sensing for poppy production
Smart Sensing For Poppy Production zielte auf eine Verbesserung des Mohn-Verarbeitungsprozesses durch Automatisierung und Digitalisierung. Die Ziele waren: Prozessoptimierung, Qualitätssteigerung und Effizienzverbesserung. Durch Workshops und Softwareentwicklung wurde eine Lösung entwickelt, die mehrere Workflows unterstützt, einschließlich Echtzeit-Visualisierung und automatischer Report-Generierung. Die Software wurde erfolgreich in die Produktion integriert.

TBI 166: Intuitives Assistenzsystem für industrielle Ausnahmesituationen
Das Ziel des Projekts war die Implementierung eines Systems, das es ermöglicht, industrielle Ausnahmefälle im Backend zu erstellen und von Maschinenbedienern am Tablet in einer webbasierten Schritt für Schritt lösen zu lassen. Im Zuge der Arbeiten wurden zwei Anwendungsfälle (Roboter) abgedeckt, bei einem funktioniert die Kommunikation per WebSocket, beim anderen per MQTT. Diese beiden Fälle können im Sinne eines Demonstrators vorgeführt und diskutiert werden.
TBI 167: Backwater Checker
Für ADEVA wurde eine innovative Plattform zur Risikoabschätzung für Rückstau und Hochwasser entwickelt. Ziel war es, durch automatisierte Datenabfragen und einen interaktiven Hochwasserrechner präzise Risikoanalysen bereitzustellen. Die Plattform kombiniert visuelle Darstellungen, LLM-gestützte Zusammenfassungen und gamifizierte Interaktionen, um Nutzer*innen zu sensibilisieren. Highlights sind die intuitive Bedienung und die zielgerichtete Datensammlung für nachhaltige Investitionen.
.

TBI 168: KI-unterstützte Stahlmarktanalyse mit LLMs
Welser Profile möchte die für sie wirtschaftlich essenzielle Stahlmarktanalyse mithilfe von KI-Tools effizienter und effektiver machen. Im Rahmen des TBIs wurden dabei folgende Teilprobleme analysiert bzw. experimentell umgesetzt:
-
Generieren von Stahlmarkt-Reports und Preisprognosen aus heterogenen (internen und externen) Quellen mithilfe von LLMs
-
KI-basierte Analyse von relevanten Diagrammen (allgemein)
-
KI-basierte Analyse von Throughput-Diagrammen
Resultat: Gute und potentiell nützliche Performance von High-End LLMs für Reporting und Diagrammanalyse
.
TBI 173: Dekarbonisieres und kreislauffähiges Getriebe
Die Eisenbeiss GmbH befand sich bei Start des Projektes in der Entwicklung einer überarbeiteten Version eines bestehenden Getriebetyps und hatte dabei u.a. das Ziel Anforderungen bezüglich des European Green Deals im Sinne der zukünftigen Ökodesign Verordnung zu erfüllen. Diesbezüglich wurde von der Forschungsgruppe Ecodesign (TU Wien) in einem interaktiven Prozess der Product Carbon Footprint des bestehenden Getriebes mittels des Webtools ECODESIGN+ ermittelt und damit emissionsbezogene Hotspots aufgezeigt aus welchen schließlich umweltrelevante Verbesserungsstrategien zur Reduktion des PCF erarbeitet werden konnten. Zusätzlich wurde die verwendete Software innerhalb von Workshops vermittelt und kann nun in zukünftigen Entwicklungsprojekten des Industriepartners eingesetzt werden. Ein besonderes Highlight war, dass das Projekt während eines Produktentwicklungsprozesses stattfand, sodass die erarbeiteten Verbesserungsstrategien unmittelbar einfließen konnten.


TBI 175: Safety Controller Security
Im Projekt wurde untersucht, wie Sicherheitsprüfungen für Embedded-Systeme, insb. die Safety Controller iSOC300 und SIC10E, verbessert und automatisiert werden können. Gemeinsam mit den Hardware-Expert:innen wurden Risikoanalysen durchgeführt und Greybox-Penetrationstests inklusive erster Protokoll-Fuzzing-Ansätze umgesetzt. Die Tests lieferten wertvolle
Sicherheitserkenntnisse und führten zu konkreten Empfehlungen zur Automatisierung von Sicherheitsprüfungen. Die Ergebnisse ermöglichen eine fundierte Weiterentwicklung der Embedded-Systeme Teststrategie im Unternehmen.
TBI 177: Testing the feasibility of using photometric stereo imaging to improve sensor based food sorting
Für die optimale Nutzung agrarischer Ressourcen und zur Erfüllung steigender Qualitätsanforderungen gewinnt die automatische, sensorgestützte Sortierung einzelner Produkte zunehmend an Bedeutung. Im Projekt wurde eine Methode zur Erkennung und Klassifizierung von defekten Mandeln entwickelt. Aktuell werden die Mandeln lediglich mittels RBG und NIR untersucht und klassifiziert. Eine Charakterisierung der Form, insbesondere des Profils, findet nicht statt.
Das AIT, Center Vision, Automation & Control entwickelte dazu ein neuartiges Aufnahmesetup unter Verwendung von Photometrie und zugehörige Auswertealgorithmen. Erste Ergebnisse zeigen, dass eine effiziente Sortierung möglich ist. Dazu sind Anpassungen an der Hardware und die Integration neuer Auswertealgorithmen bei den bestehenden Sortiermaschinen der Firma INSORT nötig.
TBI 178: Smart Casings: Digitales Design für robuste Umweltmonitoring-Gehäuse
Die Entwicklung umfasst digitale Sensoren f¸r Carbon Captures während des Enhanced Rock Weathering. Die Sensoren werden im Boden vergraben und senden autonom und drahtlos Analyseergebnisse in die Cloud. Everest Carbon benötigte ein wasserdichtes, wirtschaftlich spritzgussgerechtes Sensorgehäuse mit wechselbarer Batterie und integrierter Elastomermembran. Kreativmethoden, insbesondere der Morphologische Kasten, ermöglichten ein dreiteiliges Design, dessen Fertigbarkeit mittels Spritzgusssimulation und 3D-Druck erfolgreich validiert wurde.

TBI 179: Eco-Etikett
Die Franz Barta GmbH bietet hochwertige Transfer- und Beschichtungslösungen welche weltweit exportiert werden, bislang jedoch noch keine systematische Analyse der Umweltauswirkungen durchgeführt wurde. Um für neue gesetzliche Vorgaben wie dem Green Deal und der darin enthaltenen Ökodesign-Verordnung gewappnet zu sein, wurde innerhalb dieses Projektes von der Forschungsgruppe Ecodesign (TU Wien) der Product Carbon Footprint eines repräsentativen Transferproduktes mit dem Webtool ECODESIGN+ ermittelt, dessen CO2-emissionsbezogenen Hotspots identifiziert und daraus schließlich Verbesserungsstrategien erarbeitet. Das gesamte Projekt wurde interaktiv (Firmenbegehung und Workshops) gestaltet um die verwendete Software zu vermitteln, sodass diese in zukünftigen Projekten von der Franz Barta GmbH eigenständig für Dekarbonisierungsmaßnahmen eingesetzt werden kann. Das Projekt zeichnet sich unter anderem durch die Vielzahl an erarbeiteten Verbesserungsstrategien aus, welche nun ein breites Dekarbonisierungspaket darstellen.



TBI 180: Olfaktorische Detektion von Organischen Verbindungen unter umgebungsbeeinflusstem Rauschen
Die technische Messung von Geruch mit elektrochemischen Sensoren unterliegt, je nach Messobjekt und Umgebung, großen Schwankungen. Umgebungsgeruch und andere olfaktorische Störfaktoren beeinflussen das Messergebnis signifikant. Ziel dieses Projekts war es, die Genauigkeit der Geruchsmessung unter verschiedenen Bedingungen zu evaluieren. Dazu wurden Experimente mit unterschiedlichen Vergleichsobjekten durchgeführt, deren Signalmuster mit KI-Modellen ausgewertet wurden. Die Ergebnisse zeigen auch unter kontrollierten Bedingungen deutliche Schwankungen in der Erkennungsgenauigkeit und erfordern die Weiterentwicklung von KI-Modellen zur Filterung von Umgebungsrauschen.

TBI 181: Teilautomation DOMICO – „Montage Wandhalter“
Im Rahmen eines „Test-before-Invest“ wurde die teil-automatisierte, kraftgeregelte Vormontage von Wandhaltern bei DOMICO Dach-, Wand- und Fassadensysteme KG untersucht. Ziel war die Untersuchung der Machbarkeit eines kraftgesteuerten Montagevorgangs für die Wandhalter. Hierzu wurden Robotersysteme mit 3D-gedruckten Vorrichtungen und Mehrfachgreifer aufgebaut. Die durchgeführten Montageversuche bestätigten die technische Machbarkeit. Highlights hierbei waren die digitale Prozessentwicklung der Werkzeuge und Vorrichtungen für den 3D-Druck, die robotergestützte Montage, sowie die Vorstellung des Lösungskonzepts im Rahmen eines Workshops.
TBI 183: Energy Consumption Prediction in Injection Molding
Der Spritzgießprozess erfordert eine Balance zwischen Energieverbrauch und Produktqualität. Ziel des Projekts ist die Optimierung der Schmelzetemperatur und Energieeinsparung durch verbesserte Simulationen mit Moldex3D. Dazu wurden Simulationen mit Moldex3D und S3 verglichen, experimentell validiert und eine Energiebilanz erstellt. Ergebnisse zeigen Potenziale zur CO2-Reduktion und nachhaltigen Produktion. Highlights sind die durchgängige Simulationskette und Verbesserungsvorschläge für Moldex3D.

TBI 184: AI-optimized PID Controller
Zur hochpräzisen Maschinensteuerung werden PID-Regler verwendet, deren manuelle Parametrierung jedoch sehr zeitintensiv ist. Durch KI soll dieser Prozess einerseits automatisiert, andererseits die Regelung selbst weiter optimiert werden. Als Proof of Concept wurde ein KI-Modell entwickelt, das das Reglerverhalten analysiert und die optimalen Parameter ermittelt.
Das Ergebnis: eine deutliche Zeitersparnis durch Automatisierung bei gleichzeitig signifikant höherer Präzision in der Maschinensteuerung.

TBI 185: Wafer alignment support using synthetic data generation for image quality improvement
In the context of semiconductor manufacturing, automated wafer alignment relies on optical methods and markers. However, commercial software-based alignment inspection is vulnerable to fluctuations in image quality. This project aimed to develop and train an AI model to enhance alignment calculation by optimizing image quality. To achieve this, a model was trained using synthetic image pairs of keys with varying alignments and image qualities, allowing for improved image quality optimization.

TBI 186: Implementation of a LLM-based Chatbot for Assessing Inclusivity in Manufacturing Enterprises
Die Inklusionsbewertung von myAbility stützt sich auf Experteninput und manuelle Aktualisierungen, was Skalierbarkeit und Anpassungsfähigkeit einschränkt. COIN hat dies automatisiert, indem ein LLM-basierter Chatbot zur Unterstützung der Bewertungen entwickelt wurde. Nach dem Testen verschiedener LLMs und der Analyse der Anforderungen haben wir einen Web-UI-Chatbot mit lokalen LLMs (Ollama) aufgebaut, der Datei-Upload, Analyse, Bewertung und Berichterstellung ermöglicht. Das System ist skalierbar und kann – bei Bereitstellung ausreichender Rechenressourcen – um größere LLMs erweitert werden. Das Ergebnis ist ein anpassbares, sicheres und aktualisierbares Bewertungswerkzeug. Ein Highlight waren die Workshops bei myAbility zu KI, Chatbots und Modelloptimierung, die einen reibungslosen Wissenstransfer sicherstellten.

TBI 187: Consolidating data throughout production processes using digital twins
Im durchgeführten Projekt wurden Datensilos im Rüstvorgang von CNC-Maschinen im Produktionsprozess durch die Verwendung interoperabler digitaler Zwillinge anhand der Asset Administration Shell (AAS) aufgebrochen. Ein Datenmodell wurde erstellt.
Zur Demonstration des Datenmodells wurde außerdem ein Demonstrator entwickelt.
Die Anwendung des Demonstrators auf die erstellten Beispiele veranschaulicht klar, wie interoperable digitale Zwillinge zur Fehlerreduktion im Rüstprozess führen.

TBI 188: Artificial Intelligence for Dynamic Guided Surgery
Dentale Eingriffe werden zunehmend komplexer. Um das Personal bei Eingriffen zu unterstützen, sind neuartige Technologien wie die Unterstützung bei der Navigation in der Mundhöhle notwendig. Organisches Material wie Zähne und Zahnfleisch sind von Mensch zu Mensch unterschiedlich, daher wurden einige Algorithmen aus dem Bereich Computer Vision untersucht. Ein „Zahntracker“ wurde implementiert, welcher eine Verbindung zwischen einer 3D Rekonstruktion und einem Kamerabild des Patienten erstellt.

TBI 189: Nutzeranleitung und Optimierung für KI-basierte Datenübernahme
Lumeso, ein Startup, das sich auf die Automatisierung von Datentransfers in der Fertigung spezialisiert hat, hat es sich zum Ziel gesetzt, die Effizienz und Genauigkeit der Auftragsabwicklung in der Glasindustrie zu steigern. Die manuelle Überprüfung extrahierter Daten ist zeitaufwendig und fehleranfällig – insbesondere, wenn die Daten in unstrukturierter Form vorliegen.
In Zusammenarbeit mit SCCH wurde ein Prototyp entwickelt, der fehlerhafte Produktzuordnungen mithilfe eines KI-gestützten Konfidenzwerts automatisch erkennt und gleichzeitig die Basis für eine kontinuierliche Verbesserung des Modells durch Retraining schafft.
SCCH entwickelte einen Proof of Concept, der einen Konfidenzwert berechnet und diesen über ein einfaches Ampelsystem visualisiert. Darüber hinaus wurde ein wiederverwendbares Visualisierungstool erstellt, um die Datenqualität zu bewerten und die Systemleistung zu überwachen.
Das Projekt konnte erfolgreich zeigen, wie ein automatisiertes Validierungssystem die Leistung der Auftragsabwicklung messen und eine zuverlässige, skalierbare Datenverarbeitung in Produktionsumgebungen ermöglichen kann.

TBI 190: Faseroptische Sensorik im Holzbau
Überkopfwegweiser aus Holz haben einen geringen CO2-Fußabdruck benötigen aber Monitoring, um Inspektionskosten gering zu halten. Im Projekt wurde von AIT gemeinsam mit der HFA die Anwendbarkeit von kontinuierlich messender faseroptischer Messung (DFOS) an Probekörpern aus Holz getestet. Durch die kontinuierliche Messung entlang der Faser haben DFOS-Messungen große Vorteile ggü. konventioneller Messtechnik. Die DFOS-Messungen lieferten zuverlässige Messergebnisse mit sehr hoher Wiederholgenauigkeit.

TBI 191: Machbarkeitsstudie zur zeitlichen Propagierung von Pflanzendetektionen in der Präzisionslandwirtschaft
Ziel des Projekts war die Evaluierung von Tracking-Algorithmen zur bildbasierten Pflanzenverfolgung für den Einsatz in der Präzisionslandwirtschaft. Expert:innen des AIT Center for Vision, Automation & Control wählten fünf Verfahren nach umfangreicher Recherche aus und entwickelten ein flexibles Framework, um diese auf realistischen Daten zu analysieren. Die Ergebnisse zeigen Potenzial mehrerer Tracker sowohl für den Einsatz unter Realbedingungen als auch für die effiziente Annotation. Zudem wurden Forschungsfragen für Folgeprojekte identifiziert.

TBI 192: Studie zum Design einer Gegenstromanlage mit Entrainment-Effekt
In diesem Projekt wurde eine Gegenstromanlage für Schwimmtrainings und Unterwassertherapie mittels numerischer Simulationen untersucht. Der Fokus lag dabei auf der Untersuchung eines patentierten Systems, mit dem die Mitnahmewirkung (Entrainment) von Freistrahlen ausgenutzt wird, um eine möglichst homogene und energieeffiziente Strömung zu erzeugen. In der Studie wurden verschiedene Varianten virtuell getestet, was den Aufwand für Tests an einem realen Prototyp deutlich reduziert hat.

TBI 193: Inline quality monitoring PLA bottle preforms
Die Qualitätskontrolle von PLA-Flaschenpreforms erfordert geeignete Messtechniken für nachhaltige Verpackungslösungen. Drei experimentelle Ansätze wurden untersucht: optische Systeme mit monochromatischen und Vollfarb-Kamerasystemen für Dimensionsmessung, mechanische Rotationsplattform mit Schrittmotorsteuerung für Rundumbetrachtung und Wägetechnik mit nomineller Mikrogramm-Auflösung. Erste Versuche zeigen grundsätzliche Machbarkeit der Ansätze, weitere Entwicklungsarbeiten sind erforderlich.
TBI 194: AiSeg: Halbautomatische Punktwolkenbereinigung mit KI-Unterstützung
In diesem Projekt wurden zwei Techniken zur Beschleunigung des manuellen Punktwolkenbereinigungsprozesses zum Zwecke der genaueren Punktwolkenregistrierung untersucht. Im Falle von einzelnen Scans wird eine KI-Segmentierung auf die Panoramaansicht des Scanners angewandt, um Menschen und Objekte in der Punktwolke auszuwählen. Wenn grob vorregistrierte Scans vorliegen, werden diese für eine Stabilitätsabschätzung räumlicher Regionen herbeigezogen, um automatisch bewegende Objekte im Scan zu erkennen und zu entfernen. Die so unterstützte Bereinigung eines Außenbereich-Scans konnte maßgeblich beschleunigt werden. Als Highlight war es möglich, im Scan stehende Menschen mit nur einem Mausklick zu maskieren, sowie durchfahrende Fahrzeuge vollautomatisch zu entfernen.

TBI 196: Vollautomatische Holzplatteninspektion inkl. Dekorerkennung
Der „Test before Invest“ Partner verfügt über eine vollautomatische Produktionslinie für online Bestellungen von Holzplatten für die Möbelindustrie.
Der Bereich der Qualitätskontrolle und Verpackung ist derzeit jedoch noch rein manuell, mit sehr hohem Personalaufwand, umgesetzt.
Die manuelle Begutachtung der verpackungsfertigen Teile ist für die Werker sehr ermüdend, da die Teile teilweise in Uni-Farben, teilweise in Dekore ausgeführt sind und die Endkontrolle ein extrem hohe Konzentration erfordert. Außerdem sind die Teile in verschiedensten Größen ausgeführt, was auch ein mechanisches Handling erfordert und zusätzlich zur Konzentration auch noch körperliche Anstrengung für das Personal bedeutet.
Ziele:
- Hierzu soll untersucht werden, ob es möglich ist, die eingelagerten Dekore prozesssicher an den zu liefernden Zuschnitten zu kontrollieren. Die Zuschnitte sind immer Teilausschnitte aus eingelagerten Platten (2800 mm × 1800 mm).
- Die automatische Inspektion soll in einen automatisierten Transportabschnitt zwischen Endreinigung und Verpackung integriert werden. Herausforderung ist hier, die Bereitstellung der zeitgerechten IO-/NIO-Entscheidung aus der optischen Inspektion für den Verpackungsprozess, sodass es zu keinem Teilrückstau vor dem Packroboter kommt.
Durchgeführte Arbeiten:
- Es wurden aus den zur Verfügung gestellten digitalen Dekore Ausschnitte „herausgeschnitten“ und versucht diese erzeugten „Teile“ im großen Ganzen wiederzufinden. Diese Versuche wurden anhand von Realaufnahmen wiederholt.
- Mit verschiedenen Kamerasystemen (PROFACTOR interne Kamerasysteme und zusätzlich mit Fremdsystemen) wurden Versuchsaufnahmen gemacht, um Testauswertungen der Oberfläche und Vermessungsbeispiele zu erzeugen. Bspw. wurden Bohrungen vermessen.
Erreichte Ergebnisse:
- Die Dekorausschnitte konnten den Dekoren zugeordnet werden. Sowohl bei den Versuchen auf digitaler Basis, wie auch auf Basis einer zur Verfügung gestellten Musterplatte mit Realaufnahmen konnten positive Ergebnisse erzielt werden.
- Die durchgeführten Tests bezüglich Messungen von Durchmessern, Abständen und Winkeln haben positive Ergebnisse geliefert.
- Eine Untersuchung der Verarbeitungszeit zur Abschätzung einer möglichen erreichbaren Taktzeit ergab, dass die einzelnen Bearbeitungssequenzen möglichst parallel ausgeführt werden sollten. Geplant ist, dass abschließend die Einzelergebnisse zusammengeführt werden.
- So ergibt sich auch ein entsprechendes Konzeptbild für den Auswerterechners und dessen Ausstattung.
TBI 197: Analyse von Kreislaufwirtschaftprojekten im industriellen Sektor
Der Circular-Economy (CE) Prototyp zielt auf praxisnahe Anwendung, Anbindung an etablierte Rahmenwerke und die Quantifizierung ökologischer Einsparungen ab. Zentrale Weiterentwicklungen umfassen (a) eine neue Berechnungsmethodik, (b) modulare Architektur und (c) ein Systemspezifikationsdokument. Hervorzuheben sind Simple- und Preliminary Assessments sowie die Integration neuer Datenquellen. Ergebnis umfassen eine verbesserte Methodik, eine flexible Struktur und eine erweiterte Anwendungsbreite.

TBI 198: Evaluierung der Umsetzbarkeit von Knowledge-Graphen in PROMOS als Grundlage für AI Anwendungen
Die WELDMETRIX GmbH entwickelt Software- und Sensorlösungen zur Qualitätsüberwachung in der Metallverarbeitung. Mit der offenen Suite PROMOS werden Daten erfasst, analysiert und visualisiert. Im Projekt entstand ein Konzept samt Prototyp, der PROMOS mit einem Knowledge-Graph-basierten Informationssystem (FMEA, PPR, KI) in einer Analysepipeline integriert, um Fehlerursachen zu identifizieren und zu priorisieren sowie die Fehlerbehebung zu optimieren und damit Stillstandzeiten zu reduzieren.

TBI 199: Markieren, Unwrappen und Prägen von flexiblen Elektroniksystemen auf 3D-Objekten
Im Arbeitsprozess zur Konstruktion der 2D-Elektronik „sendance-grid“ wird derzeit „Blender“ für die Aufgaben am 3D Objekt verwendet Ziel ist es, für diese Aufgaben nunmehr ein spezialisiertes Softwaretool mit intuitiver GUI zu entwickeln, um nicht mehr auf externe Tools angewiesen zu sein. Eine Recherche nach geeigneten Python-Packages hinsichtlich Funktion, Lizenz, Wartbarkeit wurde durchgeführt. Ein lauffähiger Prototyp für die weitere Entwicklung wurde erstellt. Der derzeitige Workflow aus Blender kann im neuen Softwaretool bewerkstelligt werden.

TBI 200: Generisches Mapping für ServiceCall-Modellierung
Die EMCO GmbH bietet leistungsstarke Werkzeugmaschinen für die effiziente Fertigung komplexer Werkstücke. In den letzten Jahren lag der Fokus auf der Entwicklung standardisierter, modularer OPC-UA-Schnittstellen für verschiedene Maschinensteuerungen. Im Projekt entstand eine Methodik samt Prototyp zur einfachen Anpassung von Service-Calls und zur Entwicklung passender Backend-Services, mit Schwerpunkt auf der prototypischen Umsetzung von Methodenaufrufen.

TBI 205: KI-Prototyp zur Verarbeitung von natürlicher Sprache zur Unterstützung von Condition Monitoring
Die Firma Workheld GmbH bietet ein Tool an, mit dem z.b. Produktionsstandorte intelligent betreut und überwacht werden. Das Ziel dieses Projekts war die Analyse von Methoden, um mit künstlicher Intelligenz, beispielsweise in Form von Large Language Models, natürliche Sprache in Programmiercode zu übersetzen und weiters geeignete Signale von der Anwenderseite automatisiert abzugreifen. Die LCM GmbH hat dabei erfolgreich einen ersten Prototyp eines KI-gestützten Tools zur einfachen Code-Erzeugung erstellt und vielversprechende Ergebnisse zur automatisierten Signal-Erkennung erzielt.

TBI 206: Automatisierte NC-Programmierung für Steinfertigung
Strasser Steine produziert hochwertige Küchenarbeitsplatten aus Naturstein, Keramik und alpinova. Die hochindividuellen Kundenaufträge werden im Verkaufsdienst mit SeCAD, einer CAD-Software speziell für die Stein- und Holzbranche, konstruiert. Zur Fertigung der Arbeitsplatten werden anschließend CAM-Programme für die Bearbeitungsmaschinen erstellt.
Bei der Erstellung der CAM-Programme treten wiederkehrende manuelle Arbeitsschritte auf, die händisch ausgeführt werden müssen. So ist zunächst jede zu bearbeitende Platte korrekt auf dem Bearbeitungstisch der jeweiligen Maschine zu positionieren und auszurichten. Danach werden die Bearbeitungskanten definiert. Abschließend sind – abhängig von Plattengröße und vorhandenen Ausschnitten (z. B. für eine Spüle) – Vakuumsauger zu platzieren, auf denen die Küchenplatte während der Bearbeitung aufliegt.
Da es sich bei der Saugerplatzierung um repetitiv anfallende Tätigkeiten handelt, wurde im Rahmen des Projekts ein Softwaretool entwickelt, das diesen Prozessschritt automatisiert. Das Programm überwacht fortlaufend vordefinierte Ordner auf neue Dateien und erfasst eine neu von der CAM-Software exportierte Werkzeichnung (.dxf Datei), um die Vakuumsauger vollautomatisch zu platzieren.
Der zugrunde liegende Platzierungsalgorithmus identifiziert iterativ geeignete Bereiche, in denen Sauger positioniert werden können, und greift dabei auf einen Pool verfügbarer Vakuumsauger zurück. Sämtliche Parameter des Algorithmus sind in der grafischen Benutzeroberfläche konfigurierbar. Der CAM-Programmierer kann die vorgeschlagene Platzierung anschließend prüfen, einzelne Sauger anpassen oder zusätzliche Sauger manuell setzen. Abschließend wird die finale Werkskizze exportiert.

TBI 208: Einbindung von Open-Source Finite-Elemente-Software in den digitalen Designprozess faserverstärkter Bauteile
NOVACOM ist Spezialist für die Konzeption und Fertigung von faserverstärkten Kunststoffbauteilen. Ziel des Projekts war, numerische Simulationen von Faserverbundkomponenten mithilfe einer kostensparenden Finite-Elemente-Lösung in den Designprozess zu integrieren. Hierfür wurde von LCM ein digitaler Workflow auf Basis von Open-Source-Software implementiert und mit kommerziellen Programmen validiert, sodass künftige strukturelle Berechnungen firmenintern durchgeführt werden können.

TBI 211: Effiziente Büroplanung und Variantendarstellung
In enger Zusammenarbeit mit Mitarbeiter:innen der Firma neudoerfler wurde ein innovatives, KI gestütztes Planungstool für Büroeinrichtungen auf Basis des technischen und wissenschaftlichen State of the Art konzeptioniert. Das Ergebnis beleuchten sowohl das Potential in Bezug auf eine Effizienzsteigerung bei Planungsaufgaben, als auch eine mögliche Umsetzung innerhalb des firmeninternen Daten- und IT-Ökosystems.
TBI 212: AI-based Keyprint Recognition
Für die Fertigung eines Ersatzschlüssels sind Produktionsmaße erforderlich. Ziel des Projektes war es dafür relevante Parameter aus Fotos zu extrahieren. Dabei wurden die bereitgestellten Daten analysiert und aufbereitet, ein Proof-of-Concept Netzwerk trainiert, sowie Ergebnisse und Erkenntnisse in einem Bericht zusammengefasst. Sog. KeyPrints, wie Shoulder Points, sowie Start- und Endpunkte der einzelnen Fräsungen (Abbildung 1), wurden in ersten Experimenten erfolgreich bestimmt.

TBI 213: Projekttion für Teilaufspannung
Im Rahmen des Projekts wurde von Profactor GmbH ein innovatives Projektionssystem zur digitalen Unterstützung der Teileaufspannung erprobt. Ziel war die Umsetzung eines Assistenzsystems, das CAD-Daten nutzt, um Aufspannpunkte direkt am Bauteil sichtbar zu machen. Nach einer umfassenden Analysephase bestätigten Labor- und Praxistests die technische Machbarkeit sowie die gute Sichtbarkeit und hohe Genauigkeit der Projektionen.
Erste weiterführende Überlegungen zeigen, dass KI-basierte Erkennungs- und Analyseverfahren künftig die automatische Verifikation und Dokumentation von Aufspannungen ermöglichen könnten – etwa durch bildgestützte Lageerkennung oder zur Qualitätssicherung.

TBI 214: Fast Analysis of SysML v2 Production Model
Es wurde für die LieberLieber Software GmbH, dem Anbieter von unterschiedlichen Systems-Engineering-Werkzeugen, unterschiedliche Realisierungsmöglichkeiten für SysML v2 aufgezeigt. Derzeit unterstützt LieberLieber Software GmbH mit ihren angebotenen Werkzeugen SysML v1. Mit unterschiedlichen sprachtheoretischen Konzepten wurden das Potenzial von SysML-Implementierungsoptionen evaluiert und skizziert. Die Empfehlung setzt auf eine modellbasierte Lösung mittels abstrakter Syntax von SysML v2. Dadurch wird eine kontinuierliche Evolution der bereits existierenden Tools gewährleistet und eine textuelle konkrete Syntax wird on demand generiert, falls textuelle Werkzeuge integriert werden sollen.
NETWORKING
Networking: Tschechisch-Österreichischer EDIH Twister in Brno
Am 20. März fand in Brünn der tschechisch-österreichische EDIH Twister statt, bei der AI5production aktiv teilnahm. Etwa 50 TeilnehmerInnen aus verschiedenen Bereichen wie Unternehmen, öffentlichen Organisationen, Wissenschaft und Regierungsstellen waren dabei. Am Vormittag präsentierten die sechs tschechischen EDIHs und drei österreichische EDIHs Best Practices und Erfolgstories und konnten sich Vernetzen. Nach der Veranstaltung hatten die Teilnehmenden außerdem die Möglichkeit, das KYPO Cyber Polygon sowie das Industrie 4.0 CEITEC Testbed zu besichtigen, mit einem unterhaltsamen Robotertanz als Abschluss.
Diese Veranstaltung markiert einen wichtigen Schritt in unserem Engagement für Innovation und grenzüberschreitende Zusammenarbeit und bildet die Grundlage für künftige Kooperationen. Ein bereits geplanter Termin für die Fortsetzung der Zusammenarbeit ist das Smart Business Festival CZ 2024 in Prag am 22. und 23. Oktober 2024. Wir freuen uns darauf, dort weitere Möglichkeiten der gemeinsamen Entwicklung zu erkunden.
